本文结合模糊控制和神经网络控制的特点,设计了RBF模糊神经网络控制器,并将其应用于洗衣机控制中。
后,仿真是在MATLAB中执行的,并满足了预期的误差精度要求。
文将神经网络与模糊控制相结合,为模糊控制器提供良好的学习功能,并自动生成模糊控制规则。
过神经网络执行的模糊控制,知识的表达方式隐含地分布在整个网络中。控制应用程序中,不需要执行复杂的规则查找和推理,只有高速并行分布式计算才能产生结果。前,在人工神经网络的实际应用中,大多数神经网络模型都采用了BP网络及其变种,它也是go网络的核心部分,体现了网络的本质。工神经元。所周知,BP网络权重调整采用负梯度下降法,这种权重调整方法存在局限性,即收敛速度慢和局部极小。本文中,我们将使用在逼近能力,分类能力,学习速度和缺少局部极小值方面优于BP网络的另一个网络,即径向基函数(RBF),以实现控制合并。
面以洗衣机的控制为例来说明模糊神经控制器的设计过程。了简化控制过程,将浊度及其变化率用作控制系统的输入参数,并将冲洗时间用作系统的输出。虑到适当控制性能的要求和程序的简化,定义输入浊度H的模糊词集为{清晰,相对多云,多云,非常多云},而模糊词集定义为HC浊度的变化率为{零,小,中,大}。义输出变量U的一组模糊词为{short,short,standard,long},输入和输出域定义为[-6.6]。过总结实际控制经验获得模糊控制规则。衣机的模糊控制规则可以归纳为16条规则,如表1所示。
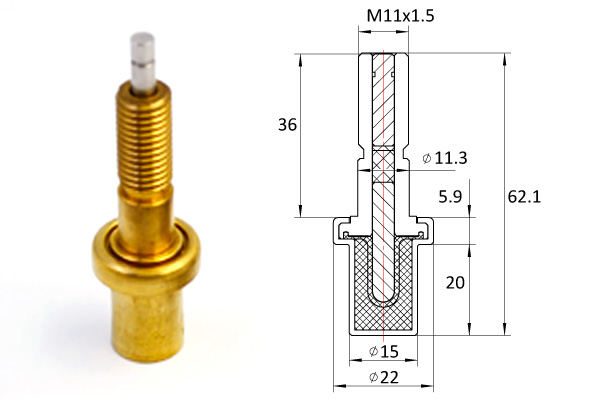
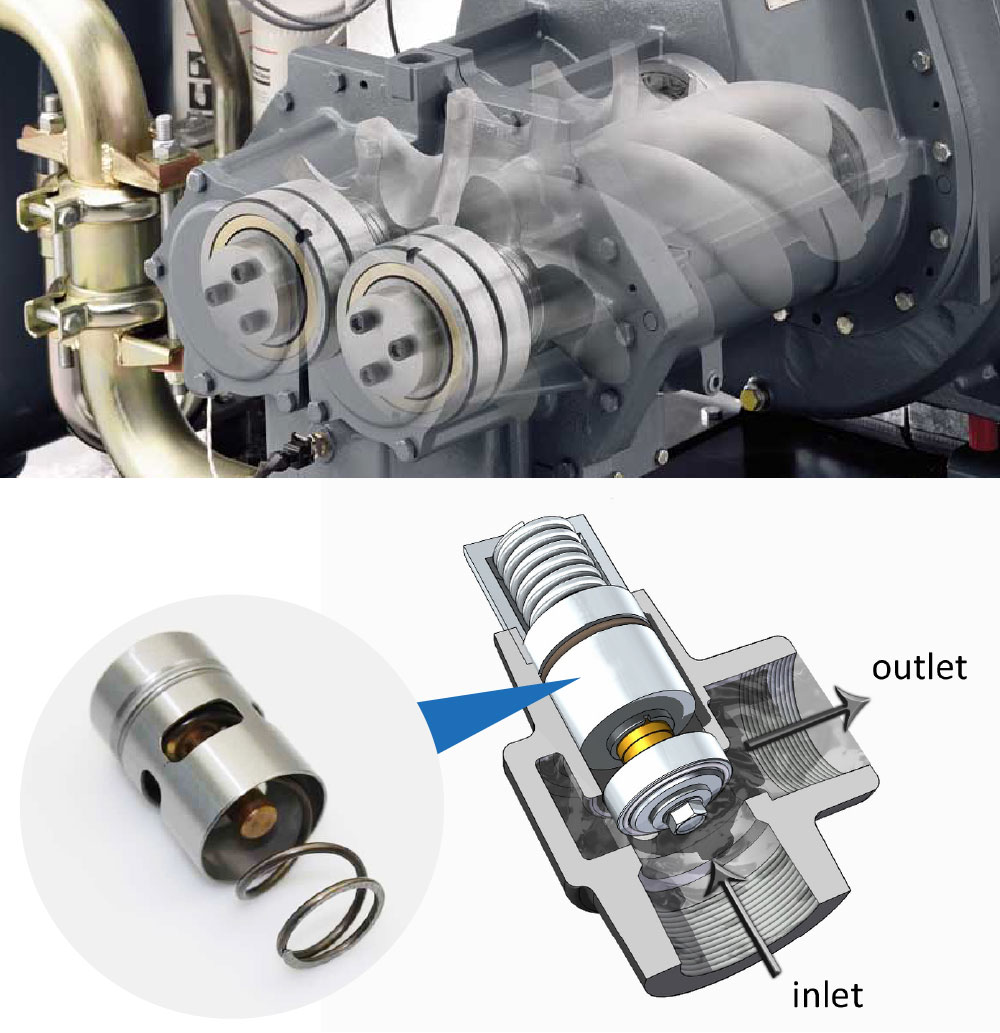
模糊控制规则表中可以看到有16条控制规则,每个规则有一对。本,恒温阀芯因此有16对样本。
据模糊子集的分配,可以获得输入和输出参数的模糊量。

用模糊量的2/3顺序输入RBF神经网络以进行离线训练。练完成后,神经网络已经存储了模糊控制规则,并且在使用时具有关联记忆功能,并且可以用剩余的模糊量的三分之一进行检查。

matlab中模拟,设置newrb()函数:GOAL = 1e-4; SPREAD = 1; MN = 20; DF =1。立一个网络模型,net = newrb(P,T,GOAL,SPREAD,MN,DF)。学习过程中,newrb()函数每个周期仅生成一个神经元,并且每个附加的径向基神经元都可以使错误最小化。果不满足精度要求,则在满足精度要求后继续添加神经元和网络设计。
功。止程序的条件是满足准确性要求或达到最大神经元数量。
过比较图1和图2的结果,您可以看到选择RBF网络的优势。模糊控制查询表的数据形成的RBF神经网络很好地近似了模糊推理过程。练有素的网络具有简单的控制过程,并且在被控制对象的数学模型不清楚或难以建立的情况下可以显示控制。能优越。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com