通过结合IPC PMAC SERVOMOTER的层次结构,开发了具有六个自由度的并行机器人的控制软件。

过使用VC 编程开发工具和PMAC开放式运动控制器的强大功能,所设计的软件满足了并行机器人实时和高精度运动控制的高要求,并体现了其特点。
幕。验还验证了整个控制软件的可靠性和稳定性。功能性和开放性作为重要的线索已经渗透到工业生产和科学研究的各个领域,而传统的运动控制系统主要具有系统独立性和封闭结构的缺点。计人员通常采用专用计算机,专用编程语言和操作系统以及专用微处理器的封闭式体系结构。种结构具有一系列缺点,例如制造和运营成本高,开发周期长,升级困难以及无法向系统添加新功能[4]。此,开放式运动控制系统软硬件系统的构建已成为工业界和学术界的热门话题。年来,机器人系统已广泛用于各种工业生产中,并在提高生产和自动化效率方面发挥了重要作用。行机器人作为一种新型的机器人,在概念上与传统的串行机器人相辅相成,并且可以满足高精度和精确控制运动路径的要求,移动速度,定位和重复定位。于它在制造和制造中起着核心作用,因此已经成为控制科学和精密加工应用领域中的重要研究方向。文研究的控制系统以六自由度并联机构的主体为对象,以PC / 104总线工业计算机为上位机,以PMAC2A-PC104运动控制器为下位机。VC 开发工具用于执行每个机器人控制模块的软件设计。了完成控制目标任务的要求。此,本文将基于系统的硬件架构,根据系统的开放性和稳定性要求开发控制软件,以达到高精度精密加工的目的。机器人系统使用两层计算机系统结构,系统结构如图1所示。层计算机使用研华嵌入式PC / 104工业控制计算机(IPC),下层计算机使用使用Delta Tau的PMAC开放式可编程多轴运动控制器。
PMAC是一种高度灵活的高性能运动控制器,具有实时性能强,稳定性好和效率高的优点,用于数据通信和信号交互上下系统的控制。是整个控制系统的核心。业计算机具有运行速度快,存储容量大和应用灵活的优点[4]。
是通过使用两级计算机控制系统,我们才能充分利用它们各自的特性并发挥各自的优势来协调系统的整体稳定性。并行机器人控制系统的体系结构中,主机的主要作用是基于以下信息完成数据输入,参数化,路径规划,任务分配和任务决策人机交互。PMAC运动控制器主要用于伺服更新和目标路径生成的在线计算,反映并行机器人各轴电机的实时状态并响应命令从主机运行。于该系统软件基于Windows操作系统构建,因此具有多线程协调处理的能力,可以及时满足并行机器人运行中的各种情况,并应对相应地出现。
为上层软件的可执行32位Windows应用程序,它通过调用PMAC自己的通信模块PComm32与PMAC内核程序进行通信,然后上层计算机软件可以灵活地调用各种控制功能。动以监视机器人的各种功能。作条件类型。PComm32是非常有效的开发工具,几乎涵盖了与PMAC进行通信的所有方法,并且与VC 开发软件具有良好的兼容性。由3个文件组成,分别是PMAC.DLL,PMAC.SYS和PMAC.VXD,其中包含250多个函数[3]。位机与运动控制器核心驱动程序之间的关系如图2所示。放式控制软件系统通常在设计时就考虑了模块化的思想,并且在此使用运动路径对软件进行编译。型和基本的机械加工要求。
件开发主要采用VC 动态链接库和多线程编程方法来实现。个软件设计框架如图3所示。先将运动控制器插入工业计算机的PCI插槽中,然后安装驱动程序。
装运动控制器测试程序,并将每个轴的伺服电机调整到坐标系中。体的调试界面如图4所示。成功安装了mover之后,有必要编写与目标和控制任务相对应的PMAC内核mover程序。PMAC最多可支持256个运动程序[3],反映了PMAC强大的伺服功能。先,根据PMAC指令定义坐标系。PMAC中的坐标系是指为同步目的而组织的一个引擎或一组引擎。后,通过轴定义指令将轴分配给电机来建立坐标系。

标系可以根据需要随时运行任何程序。次,根据所需的运动要求选择适当的运动指令,然后根据PMAC语法编写运动程序,将其下载到PMAC存储器中并运行。置运动程序后,必须使用PMAC命令行命令来设置运动程序所需的各种可变参数。Ix30-Ix35(x = 1〜6轴)和Ix87-Ix88(x = 1〜6轴)的参数可以在图4所示的软件中反复调试,以精确地调整Ix30-Ix35的运动效果。器人的每个轴电机。试界面如图4所示。
放式运动控制器的最大优点是,运动控制器为用户提供了不同类别的相关接口功能,用户可以通过以下方式灵活地调用它们:取决于软件编译过程中的相关要求。功能打开一个通道,允许应用程序使用PMAC。应用程序的原理是已经安装和调试了动态链接库,并且PMAC已在此操作环境中注册并且可以有效地解决。dwDevice参数是您要打开的设备的编号,通常为0。果返回值为TRUE,则连接成功。序完成后,应关闭打开通道,此功能是实现该功能。数和返回值的含义与OpenPmacDevice()通道打开器函数的含义相同,并且必须与OpenPmacDevice()关联。功能可以定义PMAC与主机之间的通信模式:通过总线通信或通过串行端口通信。
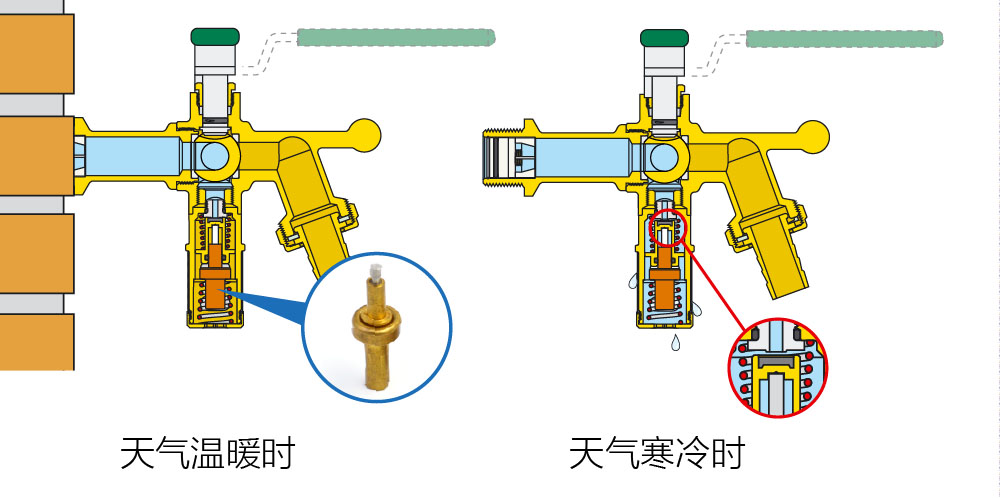
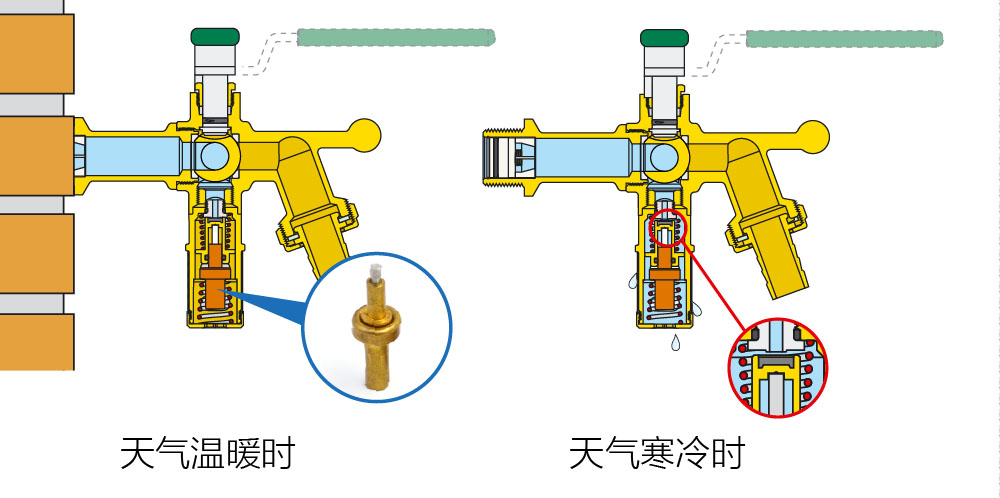
次安装PMAC或PMAC的跳线地址更改时,必须调用此函数来设置PMAC通信模式和总线地址。功能的功能是将命令发送到PMAC,恒温阀芯而Outstr参数是发送到PMAC的命令字符串。功能的功能是向PMAC卡发送请求/命令,并在用户响应缓冲区中接收PMAC响应。参数的含义是:dwDevice是设备号; s是响应缓冲区; maxchar表示接收的最大字符数; outstr是发送到PMAC的命令字符串。面已经建立了坐标系,已经配置了坐标系的轴以及与每个轴对应的电机,并且已经根据目标任务编写了PMAC运动程序。可以根据相关要求编写上位机程序,以达到机器人并行运行的目的。械制造中倒角加工的经验可用于验证该控制软件设计的可行性。用VC 中的MFC类库来设计处理要求所需的用户界面。PMAC运动控制器提供的基本运动功能类和动态链接库功能在软件项目中被隐式调用,并且config.ini,mac2ssp2v101.dll,config.pmc和其他文件位于本文中编写的ParallelRobot.dll文件。同一目录中。立主程序项目后,在VC集成环境中单击“ / project / settings …”菜单,以弹出“ Project settings”对话框。择“链接”选项卡,在“对象/库模块”列中导入新生成的链接库函数文件名ParallelRobot.lib,然后将ParallelRobot.h头文件添加到主文件d中。目实施。头文件是相关运动功能的运动控制器声明。软件程序中进行运动控制器初始化:必须在程序开始时调用运动控制器初始化功能,并且仅在成功调用后才能调用封装在卡中的运动功能。
始化功能。此实验中,由于在倾斜表面处理实验中必须将平行机器人的立铣刀与垂直方向保持一定角度(此处= 30度),因此请沿待处理物体的表面,并使用旋转铣刀铣削金属零件。样,可以铣削30度的斜角。设计可以实现并行机器人控制的目的,可以满足斜面处理的操作要求。
于并行机器人的开放式硬件结构,本文充分利用了上级工业计算机的多任务协调性能和开放式运动控制器强大的运动功能,设计了满足要求的软件系统。验证明,所设计的软件具有良好的稳定性和适用性,可以进行升级和移植,为开放式运动控制系统的应用提供了基准。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com