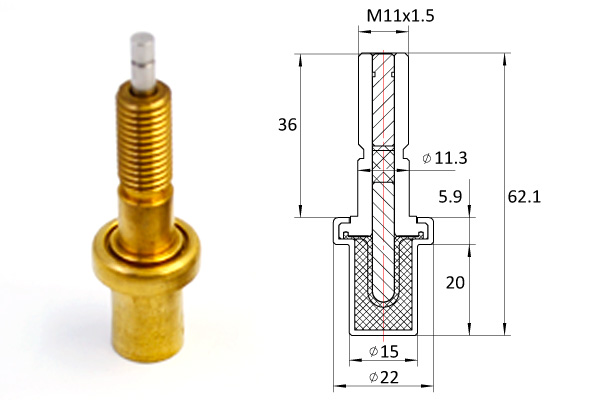
设计以MC9S12XS128微控制器为控制核心,恒温阀芯MC33886为电动机驱动芯片,E6A2光电编码器为车速传感元件,TCRT5000红外光电开关管为状态检测器的硬件电路讨论了构成控制器的道路,功率转换电路,方向舵等硬件电路,并讨论了智能汽车控制器的软件算法。
年来,随着现代控制技术,传感器技术和电力电子技术的发展,智能交通已成为研究的热点。
了更真实地模拟智能车,智能车的设计充满了智能控制系统,集感知,运动,规划,决策,控制和执行等功能于一体,涉及传感器技术,微处理器控制,信号处理,电机驱动,人工智能研究设计和功率转换。
控制器采用模块化设计,由单片机系统,电源转换,车速检测,环境传感器,驱动器组成每个引擎,方向舵,状态显示,无线通信模块等。体硬件配置如图1所示。择15个TCRT5000红外收发器作为环境检测传感器,并选择15个以“ W”排列的红外传感器作为智能汽车导航单元,安装在前面。

身体。设计使用的是转向器的Futaba S3010模型,该模型是一个脉冲宽度位置跟踪系统,通过内部位置反馈,其方向盘的出射角可以与转向信号成正比。

定脉冲宽度命令。由舵盘,减速机构,位置反馈电位计,执行电动机和控制电路组成。

负载扭矩小于其额定输出扭矩时,其输出角度将与给定的脉冲宽度成比例。
源转换电路为智能汽车系统提供稳定可靠的电源。系统采用分布式电源,可以有效减少电路模块之间的干扰,如图5所示。
体的转换电路如图6所示。系统的主控板为本质上是MC9S12XS128的最小硬件系统。由MC9S12XS128芯片组,时钟晶体振荡器电路,接口电路,复位电路和连接器组成。
据以上研究原理,所设计的控制器的主电路如图8所示。文设计的智能汽车控制器以单片机MC9S12XS128为控制核心,并与计算机通信。
机通过无线串行端口。验测试表明,智能汽车具有自动路径识别和良好的操控性。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com