在分析永磁无刷直流电动机的工作原理的基础上,设计了一种非常经济的永磁无刷直流电动机控制器。
验研究表明,该控制系统具有良好的动态响应和稳态特性。制器的硬件电路主要由两部分组成:一部分是外围控制电路,包括DC / DC开关电源,LM317T三端稳压电路,MOSFET控制电路,绝缘保护和接触器控制电路;另一部分是基本控制电路,主要基于Atmega88pa微处理器,包括霍尔信号采集电路,总线电流采集电路和RS485通信接口电路。永磁无刷直流电动机中,霍尔位置传感器检测转子的旋转磁场的位置。处理器通过收集霍尔位置信号进行逻辑处理来确定三相功率逆变桥的开关顺序。
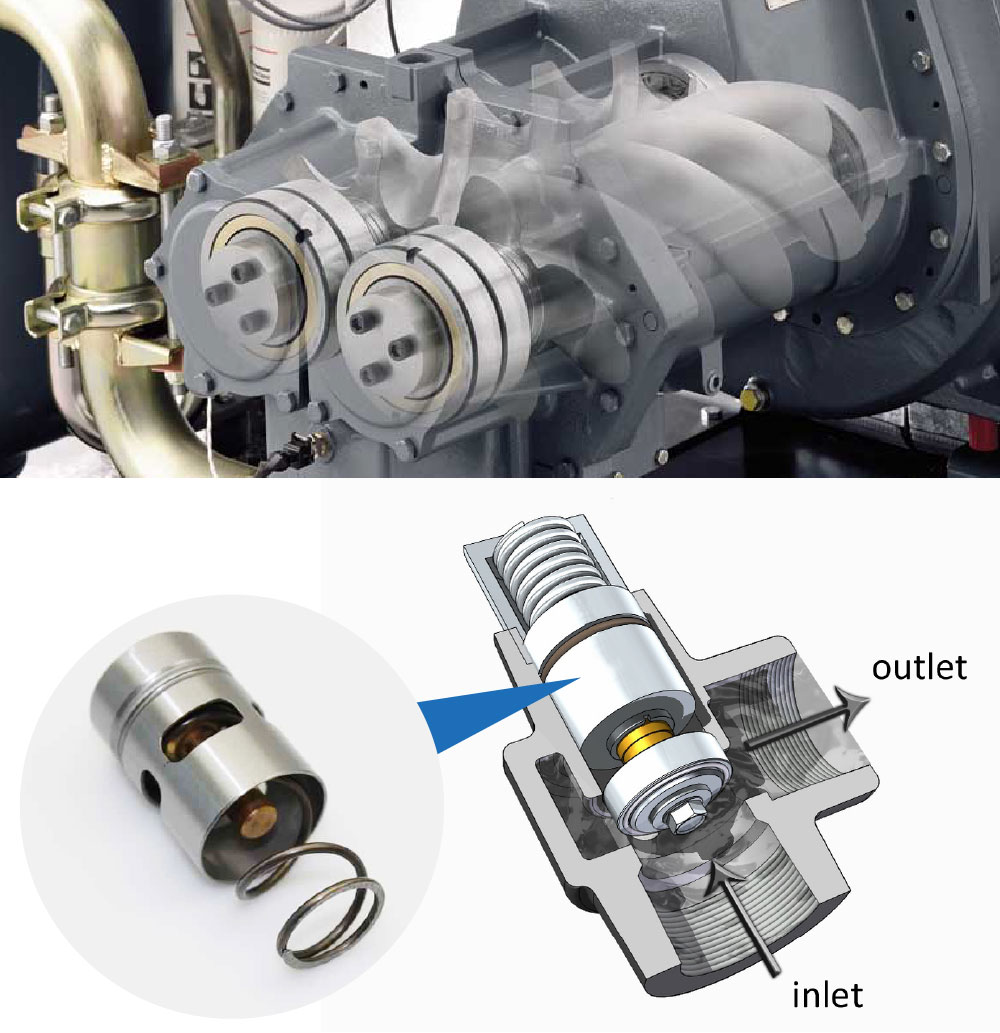
机中霍尔位置传感器的输出形式为漏极开路输出,为了获得精确的霍尔位置信号,与控制器对应的信号采集电路必须设计有返回电阻。时,为了避免无刷直流电动机线圈中的强磁场和MOSFET控制电路中高频PWM信号的电磁干扰,恒温阀芯必须设计霍尔位置信号采集电路带有低通RC滤波器以提供保护。率MOSFET控制电路的主要功能是控制三相功率逆变桥的高范围和低范围MOSFET的开关动作。了在高频PWM信号调制下实现MOSFET的正常切换,控制电路必须具有响应速度快,控制电流大和抗干扰性强的特点。
设计主要使用专用于高范围和低范围MOSFET IR2010驱动器的IR2010集成电路来满足设计要求。用IR2010的单相功率逆变桥的高端和低端MOSFET的控制电路如图3所示。VR微控制器发出的驱动信号分别控制芯片的HIN,LIN和SD端口IR2010并控制高范围和低范围MOSFET的激活和去激活。据机舱位置信号,AVR MCU将提供与三个IR2010芯片相对应的驱动信号,以控制三相逆变器桥的有序打开,以实现电动机和电动机的正负旋转。度控制。了在设计电机控制器软件时方便进行数据调试和故障诊断,集成在AVR微控制器中的USART(通用同步/异步串行接收器/发送器)用于执行串行通信功能。MAX485通信芯片配合使用。RS485通信接口采用平衡驱动器和差分接收器的组合,抗干扰性好,传输距离远。线过流保护功能是控制器硬件电路设计的关键内容,它与控制器的操作安全性有关。设计采用软硬件结合解决的问题,不仅可以有效地保护控制器和负载电机的安全,而且可以在此基础上充分利用电机的过载能力,提高效率。辆操作。线过电流保护电路必须首先解决总线回路中高精度电流收集的问题。设计使用霍尔效应变压器进行电流采样。样信号被放大器电路放大,然后发送到AVR微控制器进行处理和计算。

尔效应变压器不仅可以为电源电路和控制电路提供电绝缘,而且还具有良好的电气性能,例如线性好,精度高,动态响应快。母线电流值进入过流保护点时,AVR微控制器将自动减小PWM控制信号的占空比,及时减小MOSFET并减小母线电流。制策略的选择与控制系统的性能直接相关。何控制系统都有三个基本要求:稳定,精确和快速。中,“稳定性”是最基本的要求,“准”是稳态下的要求(稳态误差低),而“快速”是动态下的要求(过冲小且过大)。整时间短)。PID控制是最早开发的控制策略之一,由于其简单的算法,良好的鲁棒性和较高的可靠性,它被广泛用于工业过程的控制中。刷直流电动机速度控制系统是一个高度耦合,高度耦合的非线性系统。字PID控制算法分为位置PID算法和增量PID算法。于位置PID算法,要计算u(k),不仅必须将当前偏差信号e(k)和e(k-1)加上以前的偏差信号e(j)添加到整个学期。样,不仅计算量大,而且还需要大量内存来保存e(j)。此,在基于单片机控制的无刷直流电动机系统中,增量式PID算法主要用于速度控制。
次复位MCU系统后,首先执行初始化程序,然后激活中断功能并执行主程序。系统有中断请求时,将调用并执行中断服务程序。始化过程包括设置系统时钟,定义中断向量,初始化I / O端口,定义控制寄存器以及初始化各种功能模块。测试条件下,与控制器相对应的测试是6 kW永磁无刷直流电动机。
流电源使用免维护的72 V / 150 Ah铅酸电池。试过程中,电机运行稳定,调速效果好,控制器性能达到设计要求。
制的设计以安全性,可靠性和稳定性为目标。设计的控制器具有比较全面的保护功能,自诊断和故障恢复功能,并具有良好的扩展能力,方便硬件升级:控制器硬件电路简单,成本低廉,易于操作和维护。
本文转载自
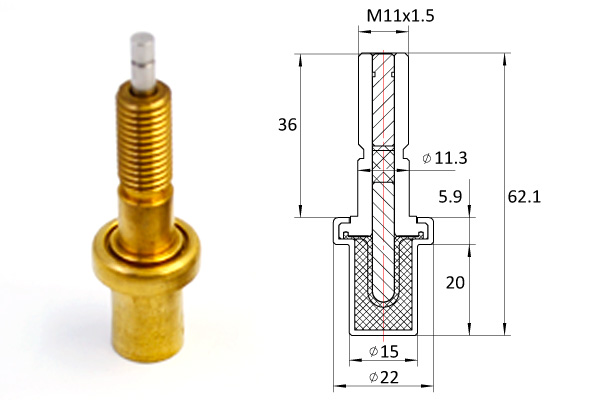
恒温阀芯 https://www.wisdom-thermostats.com