通过研究控制理论的基础,使用MATLAB / Simulink仿真设计软件来分析和研究室温控制系统的自动控制。研究中,用户定义最佳温度值,在温度控制过程中使用PID算法,分析并建立系统中每个受控对象的仿真模型,并研究并获得传递函数每个链接。

MATLAB / Simulink软件模拟了室温下的PID控制系统模型。

MATLAB中PID恒温控制系统的仿真过程中,分析并获得了最佳的PID控制参数,以获得最佳的恒温控制效果。度,作为决定居住环境舒适度的重要因素之一,对室内自动温度控制系统的研究受到广泛关注。PID算法是最常用的温度控制算法,它具有操作简单,性能优越,调试方便等优点,常用于自动控制领域。调试过程中,可以调试KP,KI和KD参数。许多情况下,三个单元不是必需的。中的一两个可以在比例控制的原理下采用。
本文中,确定了受控对象数学模型的传递函数。过对PID控制器进行恒定测试以及KP,KI和KD测试,可以实现最佳的恒温控制效果。PID控制器分为(P)比例链接,(I)积分链接和(D)差分链接。
了获得模糊PID阈值的特定值,我们必须根据预定义的模型在通用PID控制器中定义阈值,然后使用该阈值在模糊PID控制器的比例,积分和微分环节中定义阈值[1]。常,通过增加比例因子,可以加快系统中的响应速度,并可以减小系统中的静态差异。比例因子增加太多时,系统不仅会振荡,而且还会降低其稳定性。过增加时间系数,可以提高系统的稳定性并减少振荡,但是可以增加系统的静态系数。加微分时间可以加快系统的响应速度,减少其超速运行并提高系统的稳定性,但这会降低抑制系统干扰的能力。PID控制器中有许多设置阈值的方法。常使用两种类型,理论阈值设计方法和技术阈值定义方法。于系统中的数学模型设计用于定义理论阈值的方法。
论阈值用于计算控制器阈值。是,计算出的阈值参数不能直接使用,必须结合实际应用进行调试或修改。义工程阈值的方法包括Ziegler-Nichols调整法,衰减曲线法和临界比例法。
算过程的特征不同,但是必须通过实验测试和分析控制器阈值参数,并根据工程经验公式确定其值[2]。性环节是惯性反作用力。的出口不会与开始时的入口成比例地变化。过渡过程停止时,y(t)将按比例传递给x(t)。中,Tc表示惯性键的时间常数,k为放大率。
于偏移链接,输出在更改输入后不会立即更改,需要花费一些时间才能反映出来,并且延迟时间T较大时不容易控制。果要对在恒温加热控制系统中控制的对象的数学模型进行建模,则必须选择适当的数学模型以简化或采用实际对象中的数学语言。热器被视为单个容量对象,无论容量偏移如何,其传递函数都是。中,时间常数T3 = 2.5(min),放大倍率K3 = 15(℃·h / kg)。行器传递函数的公式为K4 = 1和T4 = 1.35。度传感器收集空气温度,并将收集到的温度信号传输到Raspberry Pi,模拟加热温度控制单元的操作。
个房间温度控制系统包括控制对象(加热室),阀门调节器,温度传感器和PID调节器。PID控制器的最佳参数通常由反复试验确定。据控制对象的特性和调节,该系统会多次尝试PID调节器的参数KP,KI,KD。
过在MATLAB / Simulink中对系统进行计算机仿真,可以得到最佳的控制参数。为Kp的值越大,变量的变化就越快,但太容易振荡。果Kp的值小,则系统易于稳定。系统具有消除稳态误差的强大能力。着Ti值的减小,积分效应增加。果Ti的值太小,则过渡过程的振荡更加明显。分时间取为0.009。果太大,则会增加过冲。果太小,将导致轻微的铅效应。PI控制仿真图如图3所示。KP = 0.001,KT = 0.0009,KD = 0.0001,仿真时间为10000 s。真结果如图4所示。仿真图所示,系统趋于稳定在3000 s左右,并且将温度控制在定义的温度下。过比较PI和PID控制系统对干扰的控制性能,从图中可以看出,PID的抗干扰性能明显优于PI控制系统,这是由于其效果尽早纠正差异。
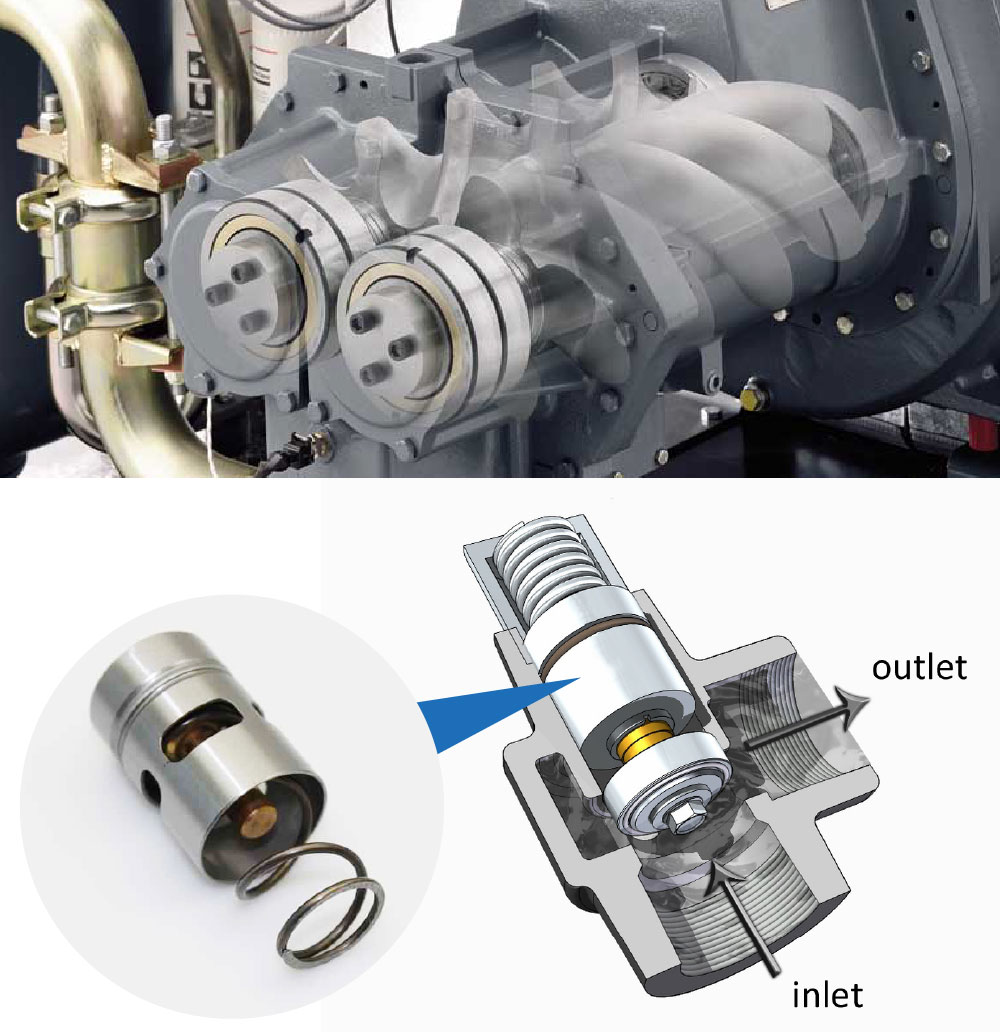
据供暖系统室的特点,对受控对象进行分析研究,建立其数学模型。据最佳温度值设置,使用MATLAB和Simulink仿真软件在控制系统上执行PI和PID控制仿真。者均取得了良好的控制效果,并获得了恒温控制系统的仿真结果。过比较PI和PID系统的控制仿真曲线,恒温阀芯可以看出PID的抗干扰控制性能强于PI。

来使用MATLAB对恒温控制算法进行选择和仿真,具有很强的实用性和建议。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com