针对几个特征指数相同的多个传感器的数据融合问题,提出了一种基于灰度相关的多传感器数据融合方法。方法将每个传感器测得的数据作为一系列行为进行处理,使用灰度相关度来测量不同传感器测得的数据之间的接近度,并通过传感器的相关矩阵穷举地测量数据之间的完全接近度。色。对称矩阵的性质用于获得数据融合表达式中每个传感器的测量数据的权重,以便执行多传感器数据融合。真结果表明,将该方法应用于雷达数据可以有效减少跟踪误差,提高测量精度。

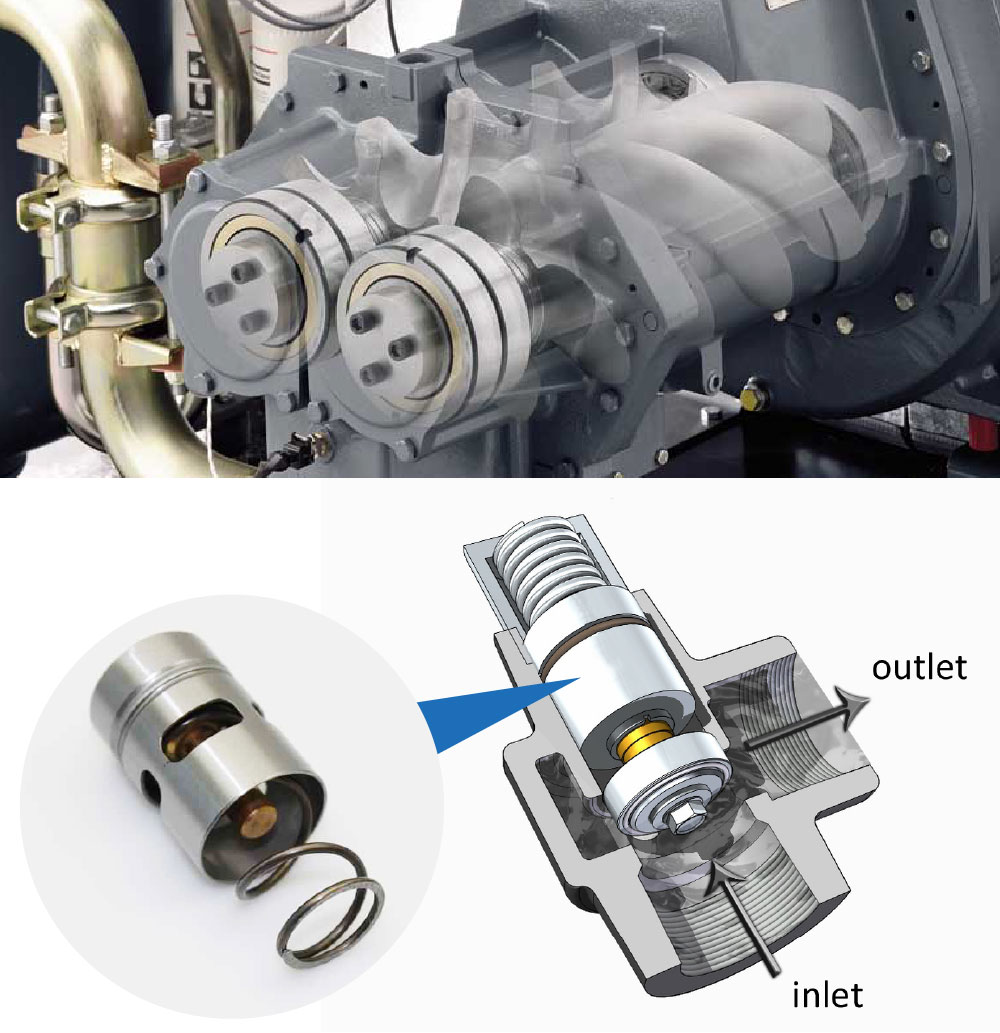
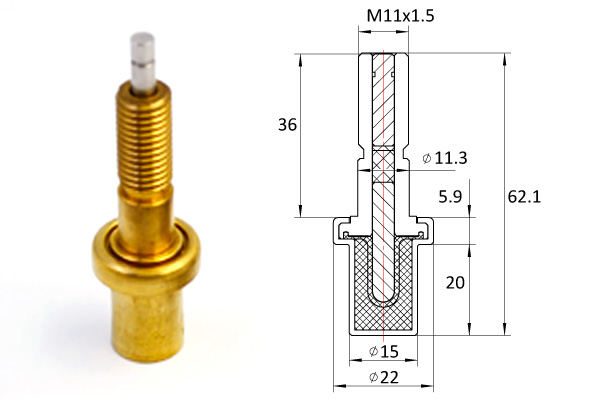
多个雷达同时跟踪目标时,由于诸如雷达噪声和外部电子干扰等环境因素的影响,雷达测量数据有时可能不准确或不可靠[1]。而,数据融合技术用于每个传感器。测量数据进行融合处理可以有效降低设备的误报率,恒温阀芯提高雷达的识别和跟踪能力[2-3]。果,许多专家和研究人员将找到获取雷达数据作为搜索方向的最佳融合方法[4-8]。考文献[6]将置信距离量度应用于多传感器数据融合方法,参考文献[7]将遗传算法应用于多传感器分层融合方法,[8]将最小二乘法应用于融合方法。传感器数据。是,这些方法通常要求要跟随的目标具有一定的概率分布,但是在实际环境中很难找到它,因此研究更适合工程应用的新方法非常重要。色关联理论可以弥补统计统计理论的不足,它也适用于有规则或无规则的数据,涉及的计算量少,非常实用。过考虑几个传感器的当前测量信息并使用它们的历史信息,本文介绍了一种新的灰色关联数据融合方法:后者将每个传感器测得的数据作为行为序列进行处理并使用灰色关联。量由不同传感器测得的数据之间的接近度,并通过灰色相关矩阵详尽地测量数据之间的完全接近度,然后根据非负对称矩阵的性质,确定测得数据之间的关系。每个传感器在数据融合表达式中表达。
行多传感器数据融合的权重。控系统具有一个传感器,可以同时观察相同的指标。
果通过内部和外部环境因素的影响确定与其余数据的灰色关联,则可以在特定时间确定第一传感器的第一测量值的精度。果灰度相关大,则意味着测量数据是准确的。度高,否则精度差。
辨率很好[10]。据的当前性,还可以参考其历史信息。
个传感器测量的数据被认为是一个行为序列,根据灰色系统的理论,两个行为序列之间的接近度可以通过一般的灰色相关度来度量。间传感器和测得的传感器数据之间的相关性是,并且很容易看出灰色相关性是广泛的。这一点上,这两个行为序列被认为根本不接近。公式(2)中,定义的形式不仅充分利用了灰色关联度的好处,而且逼近了适合计算的现实。感器被配置为同时测量一个指标,当您进行第一次采样时,将设置每个传感器测量的数据之间的灰度相关度,并设置灰度相关矩阵。前,第一传感器的测量数据与大多数传感器的测量数据接近,相反,最大数量的传感器的测量数据相差很大。

部放在一起。为,是一个非负对称矩阵。式(14)没有考虑传感器之间的不同融合权重。第二个传感器在第一个样本处测得的方差的最终估计值。虑到每个传感器在给定时间以及整个时间轴上的可靠性,采用递归方法。共有三个雷达,它们的范围是一切,每个雷达的接受概率是,半径的均方误差是一切,检测角度的误差是,采样周期是1秒。标的起始距离是匀速直线飞行,环境噪声是高斯白噪声,阈值是。1显示了目标的实际距离和雷达的测量距离,恒温阀芯其中jj_true表示目标的实际距离,jj1,jj2和jj3分别表示雷达1,雷达2和雷达3的测量值。真结果如图2和3所示。
图中可以看出,使用平均加权方法的数据融合方法,雷达测量范围的最大误差约为50 m,并且灰色关联度数据融合方法,在雷达测量范围内最大误差约为20 m,表明基于灰色关联度的加权数据融合方法可以有效降低跟踪误差,提高了测量精度。文提出了一种基于灰色关联理论的灰色系统多传感器数据融合新方法。
方法将每个传感器测得的数据作为一系列行为进行处理,使用灰度相关度来测量不同传感器测得的数据的接近度,并通过传感器的相关矩阵详尽地测量数据的完全接近度。色。据融合表达式中每个传感器测得的数据权重,因此可以融合多传感器数据。真实验表明,灰色关联数据融合方法可以提高跟踪精度和雷达系统,为深入研究多雷达跟踪问题,提出了解决该问题的方法。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com