本文简要介绍了层间交互式分布式路由技术及其实现过程,并分析和评估了其性能。究证实,多层交互式分布式路由技术可以满足无线多媒体传感器网络通信的操作要求。
用无线传感器网络的传统移动通信技术是基于能量受限和无限动态特性的问题。此,难以保证无线多媒体传感器网络服务的高质量。此基础上,研究用于无线分布式传感器网络的多层移动通信技术具有实际意义。
文档提供了可满足无线多媒体传感器网络许多要求的分布式多路径路由技术。向图G(V,恒温阀芯E)通常可用于描述无线多媒体传感器阵列(V是多媒体传感器节点的集合,E是用于视频数据传输的无线通道的集合) 。

果随机分布N个节点,则每个群集覆盖的多媒体传感器节点可以表示为(O(1)≤n≤0(N))。
O(i)是多媒体传感器节点的分组,dij是O(nj)和O(ni)之间跳跃的通信距离; γ是多媒体传感器节点的直接通信距离; ω是节点信号传输的干扰半径。于丢失或错误的视频数据,它们可以被分为P图像/ I帧/ B图像数据分组为MPECG-4视频帧,并且分别由FEP / FEI / FEB描述。间交互式分布式路由技术基于遗传优化算法的预测模型,一般来说,层间交互式分布式路由技术的工作架构如下:连接到接收节点或相邻节点。点广播该消息,将源节点的广播消息转发到各组的邻居节点后,立即将确认信息发送给源节点,源节点通过该方法从集群区域中获取位置信息。认信息并采用遗传优化。算法预测相应区域中节点的感知能量,并将预测消息发送到相应的群集。集头节点从群集节点收集剩余电量,并将收集的结果返回到源节点。余能量,感知能量和两者之间的比率的二维数组,同时选择满足视频数据接收节点比率的最大路径。
间协作路由机制。
于分布在无线多媒体传感器网络中的层间交互式路由算法的体系结构,在吞吐量,能效和通信效率方面,协作,非协作,MATLAB和NS-2路由技术的性能比较和分析传输速率。1详细列出了实验参数。实验的目的是研究基于遗传优化算法和层间交互式分布式路由技术的MATLAB协同路由技术的实现。外,Nakagami_m信道用于表示无线链路信道,QAM-VSB调制是一种实验性调制方法。图2所示,协同传输技术的能效与系统吞吐量成正比关系,即系统的高效率和高吞吐量是一一对应的。
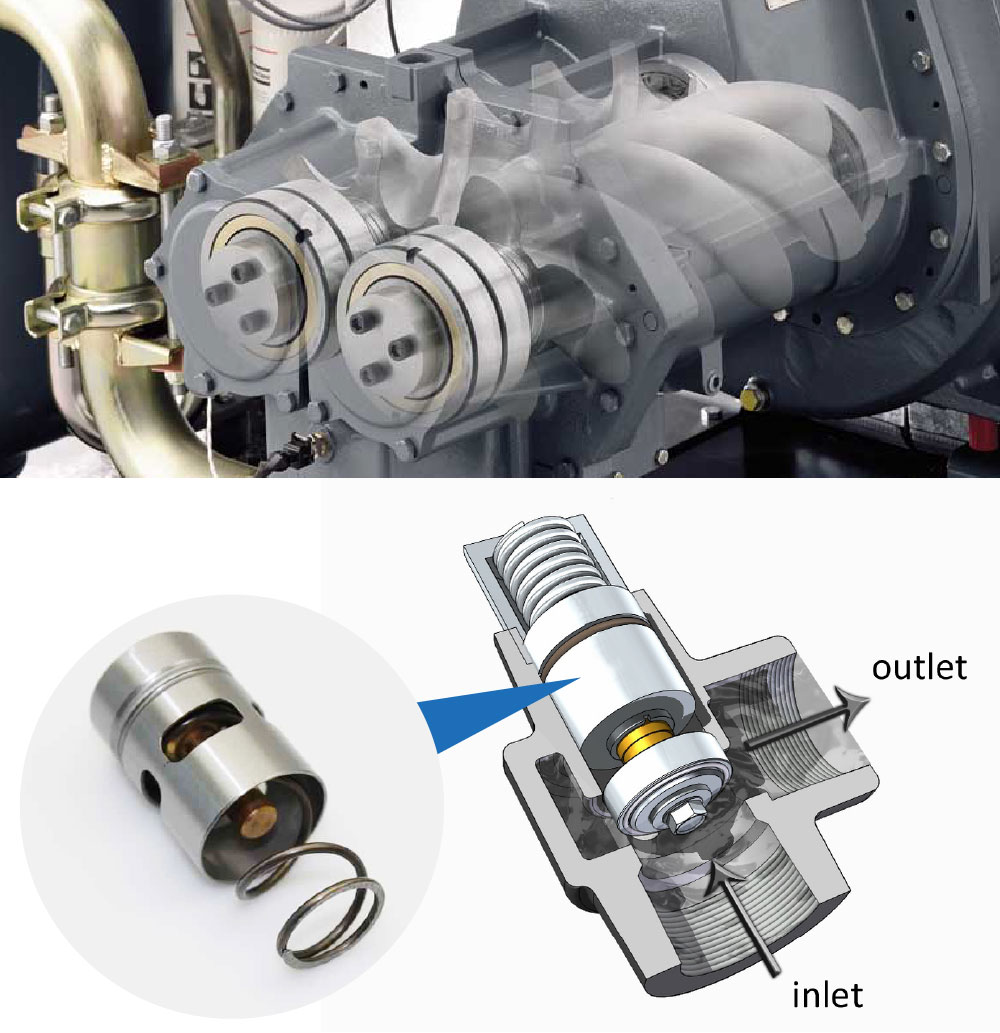
; 。时,对于无限多媒体传感器网络的视频负载变化所涉及的延迟,路由开销和分组传输速率的性能,比较结果主要包括以下重要层:基于遗传优化算法的层间交互式分布式路由技术终端,协作路由技术和非协作路由技术之间的平均延迟与网络视频负载成正比:对于分布式路由技术基于遗传优化算法的层间交互,恒温阀芯终端之间的平均时间平滑。

是最小的:成功的数据包传输率都在下降,而协作非协作路由技术要比其他两种技术低。
常,MPECG-4编码视频帧的GOP结构可以为基于遗传能量优化算法进行预测的协作,协作多层路由技术的实现提供有利条件。知能量。统开销,系统吞吐量以及能量端点和剩余功率之间的平均时间相对较高,并且完全可以满足无线多媒体传感器网络的需求。之,基于遗传优化算法模型的预测,基于无线链路信道的质量,与多媒体传感器节点的感知能量及其剩余能量比相关联,建立了优化的,交互的,层间和多层的协同合作路由技术,该技术适用于网络层,应用层和链路层。MATLAB的数学分析和NS-2的仿真证实,遗传优化算法实现了最短的收敛时间,反映了实时多媒体通信的相关特性。保网络能量状态预测的准确性和可靠性。外,基于遗传优化算法的协作路由和分布式层间交叉优化技术改善了对各种有限资源(宽带无限多媒体传感器,网络能量,信道链接等)的使用。时实现无线多媒体传感器网络的生命周期。

扩展提供了长视频数据传输的可能性。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com