对于标准粒子过滤器(PF)中的粒子降解和过度计算的问题,将遗传算法中的选择,交叉和变异操作引入FP中,而不是采用传统重采样,提出了改进的继承。子滤波算法(GPF)。算法使用实数来避免二进制编码操作。GPF和PF诊断出三个常偏差,恒定增益和传感器阻塞的常见缺陷,并比较了两者的诊断结果。真结果表明,GPF提高了粒子多样性,有效解决了粒子降解问题,提高了过滤精度和实时性。状态估计故障诊断方法中,基于卡尔曼滤波器(KF)方法的故障诊断方法已被广泛使用。是,大多数现代故障诊断系统都面临带有时变参数的非线性参数,建模不精确,而且由于外部干扰,很容易产生故障和错误警报。
外,系统噪声的统计特性一般不服从分布,当滤波方法解决了非高斯非线性系统的问题时,很难获得状态的最优估计。年来开发的粒子滤波算法可以更好地适应所观察信息中异常信息的情况(高鲁棒性)。远远超出了卡尔曼滤波器理论的传统框架,可以应用于任何非线性。
高斯系统对系统的过程噪声和测量噪声没有任何限制,并且很容易获得状态的最佳估计值[1? 3]。果,近年来,国内外专家将粒子过滤技术应用于传感器故障诊断[4? 8]。是,标准的粒子滤波器会出现粒子退化现象,导致粒子多样性下降,影响算法估计的准确性,目前的解决方案主要是选择一个大而一致的密度函数。经出现了许多改进的粒子滤波算法,例如高斯粒子。镜,高斯和粒子滤镜,高斯粒子滤镜,厄米,边缘粒子滤镜等。些研究人员也在考虑使用优化思想来解决粒子降解问题[9]。而,现有算法通常使用遗传算法来进化粒子以获得高质量的粒子集,这避免了二进制编码操作并增加了算法的复杂性。文将遗传算法的选择,交叉和变异操作引入到PF中。
需要二进制编码操作,代替重采样方法,可以获得遗传粒子滤波(GPF)算法并将其应用于传感器错误诊断。真结果表明,GPF不仅可以有效地解决粒子退化问题,而且可以提高算法的实时性。障诊断既需要故障检测又要基于残基的故障识别,包括故障的大小和类型。
障的大小是可识别的,残余量[g(sk 1)]表征了故障的大小。于不同类型的故障,残留信号表示不同的趋势。此,通过分析残留物的形状和大小,可以确定缺陷的类型。传感器出现恒定的偏转误差时,偏差幅度[g(sk 1)]会发生跳跃。GPF的预期输出值迅速赶上实际输出值时,过渡消失,剩余平均误差变为零。[E(ek 1),0]。果在系统过渡阶段出现恒定的传感器增益故障,则剩余幅度也会增加。果系统过渡过程处于上升阶段,则剩余幅度跳跃是递增的;当系统过渡过程为向下阶段时,残留振幅跃变会减小。GPF预测的输出值与实际输出值相对应时,剩余幅度平均值再次变为零;如果一旦系统稳定就发生故障,则残余振幅变化类似于恒定挠度缺陷。发生传感器卡纸时,实际输出值是恒定的,偏差幅度将具有相应的跃迁。GPF预测的输出值与实际输出值匹配时,残差平均值为零。
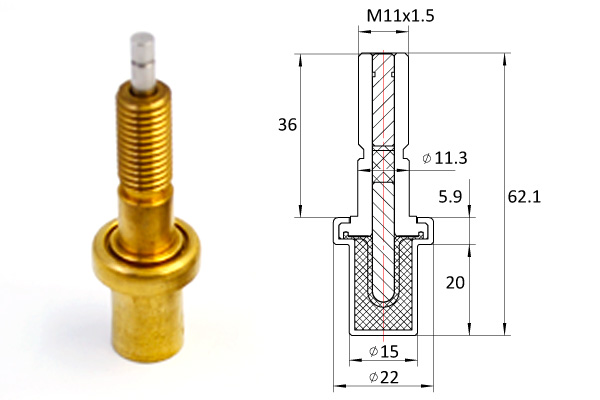
此,根据故障发生时残余曲线的形状和大小的变化,并结合系统的实际情况和经验知识,恒温阀芯有可能识别出已发生故障的类型。于无法直接测量系统的状态,并且系统中存在的噪声导致系统输出和状态变量的随机性,因此估计系统状态变量的准确性系统直接确定故障诊断的准确性。文利用遗传粒子滤波器(GPF)对状态进行估计,并对输出进行预测,并与实际输出进行比较,得到残渣并进行故障诊断。GPF算法主要考虑遗传算法中突变的选择,交叉和进化的思想,而不是传统的重采样方法,必须引入颗粒过滤器(PF)。于遗传算法具有独特的优化能力,因此可以提高粒子的计算效率,大大减少了达到后验概率分布最大值所需的粒子数量,并且避免了重采样。在一定程度上减少了计算量。量可以有效地提高算法估计的实时性能,而遗传功能可以有效地增加粒子多样性并解决粒子降解问题,从而可以提高算法的过滤精度。算法有效地防止了滤波器的发散,提高了状态估计的准确性。文介绍的GPF算法使用实数来避免二进制编码操作。1和2是蒸汽压力传感器的残余曲线,在200 s处具有恒定偏差误差,残余幅度为1。3和4显示了压力传感器的恒定压力故障。汽压力,增益为0.01到300 s。图中可以看出,残差曲线的残差幅度大约为1.4;图5和图6是在阻塞的400秒故障中的蒸汽压力传感器的残余曲线,恒温阀芯可以从该图中获得,其幅度为大约2。图表明,当传感器中发生相应的故障时,残余振幅会从零变为零,并且这种过渡将不会一直保持下去。在系统上快速跟踪滤波器的预期输出之后,残留振幅迅速收敛到零,表明该噪声不影响故障诊断的结果,并且没有错误警报故障,表明微粒过滤器对于故障诊断具有鲁棒性。外,根据剩余振幅的变化和系统的特性,可以识别已发生的传感器故障的类型。1显示了故障排除期间GPF和PF算法的残差曲线收敛到0所需的时间。文将粒子滤波器(PF)用于传感器故障的诊断,并通过引入PF遗传算法中突变的选择,转移和进化的思想而获得。不是传统的重采样方法。用非线性160 MW燃料单元系统作为研究对象,PF和GPF可用于诊断蒸汽压力传感器的三个常见偏差,恒定增益和失速缺陷。果表明,GPF方法可用于诊断传感器故障,并且与PF算法相比,只有少量的粒子才能实现更好的实时过滤精度。实,GPF应用了基于PF的遗传算法的优化功能,增加了粒子多样性,解决了粒子退化的问题,并且可以提高状态估计的准确性,同时降低粒子数。
免了重采样,减少了计算量,从而有效地实时提高了算法的性能。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com