介绍了巨磁阻传感器在角速度测量中的应用,并对测量装置进行了改进,可以随时精确地测量转台的位置,并可以在任何时期精确地测量角位移。
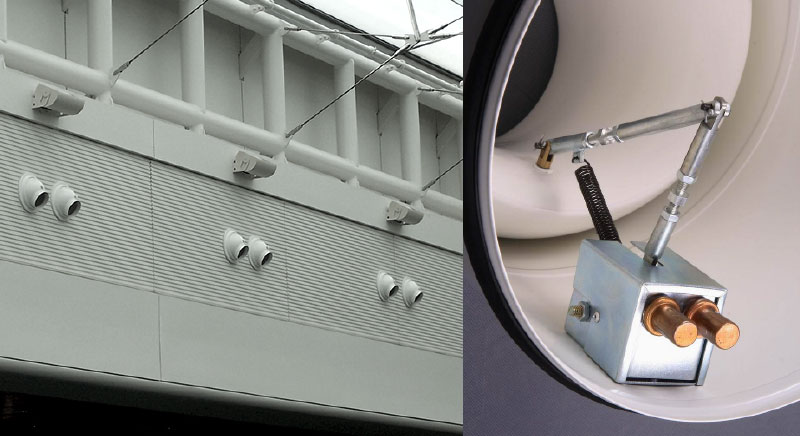
磁阻传感器(GMR)是结合磁膜,半导体集成和纳米技术的高科技产品。的技术结构采用一个数学公式:GMR传感器=磁性材料 纳米技术 半导体集成。光电传感器等传感器相比,GMR传感器具有以下优势:低功耗,高可靠性,小巧的尺寸以及在恶劣环境下的工作能力。旋转编码器的非接触式开关。1是角速度传感器的工作原理的示意图。块电磁钢附着在转盘的边缘,GMR传感器附着在车轮上并保持一定距离。

磁钢磁场的方向和GMR传感器的传感器轴的方向都在转盘的切线方向上。
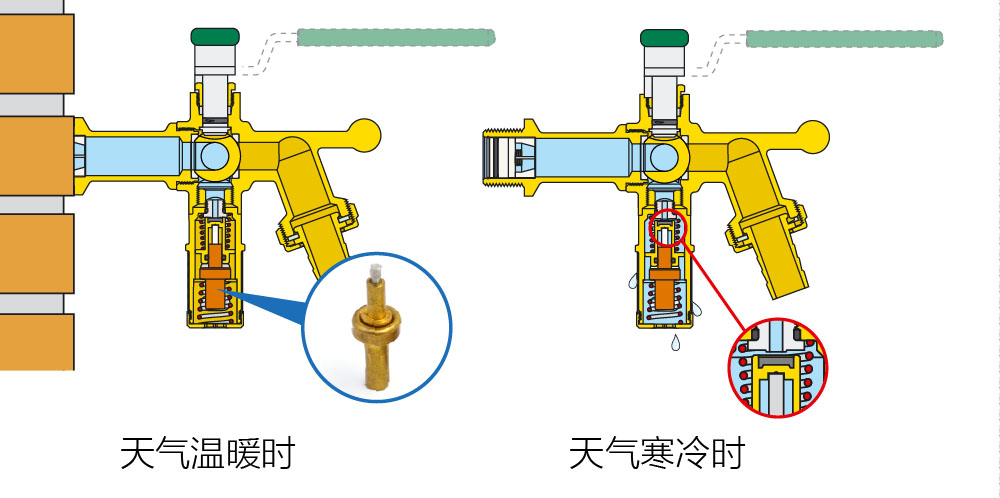
着转盘旋转,恒温阀芯磁场由于旋转而相对于固定的GMR传感器改变方向,从而导致磁场传感器引脚GMR的输出电压发生变化。
当两者彼此靠近时,才会生成高压脉冲输出。此,每次转盘转弯时,都会产生电压脉冲输出。过记录电压脉冲的输出,可以计算出转盘每单位时间旋转的电弧,即转盘的角速度。2是电压脉冲输出与时间的关系图。转盘以恒定速度旋转时,相邻电压脉冲之间的间隔设置为T,并且转盘的旋转速度为。
于传感器的输出电压在最高时刻为零,因此无法随时确定转盘与参考方向形成的角度,即上面的设备不会在给定的时间间隔内无法准确测量转盘旋转的角位移。
3是基于图1的角位移测量的改进操作的示意图。
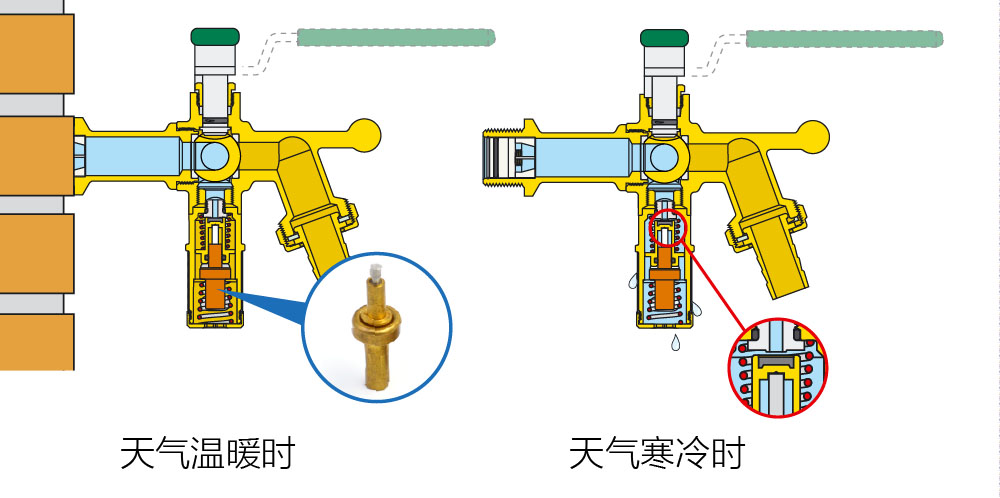
个电磁钢部件均匀地固定在转盘上,并且GMR传感器固定转盘的中心(板的旋转)内部磁盘上未完成翻转)。转盘的位置与图3所示的位置相同(参考位置)时,传感器的输出电压设置为2V;当转盘旋转时,传感器的输出电压U(ΔZ) = 2(cos?Z sin?)(0≤兹≤90°)。4是示出传感器的电压输出与基准方向之间的关系的曲线图。图中可以看出,转盘每旋转一圈,传感器的输出电压就会在参考方向的45°,135°,恒温阀芯225°和315°达到四次峰值。录中间电压峰值的出现次数和在时间的开始和结束时的电压值就足够了,以便在任何时候准确地测量转盘的位置以及给定时间段内的角位移。

进了在巨磁阻效应下研究开发的巨磁阻传感器及其测量角速度的原理,从而可以在任何时间准确测量转盘的位置以及在任何周期内的角位移角速度传感器在角位移的测量中精度不足。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com