感测传感器的附加质量效应可能会对轻型平板结构的模态测试结果产生重大影响,并将进一步影响参数识别,有限元建模和建模的准确性和准确性。后的计算。制动器的刹车座为例,建立了附加振动传感器的有限元模型,通过实验模态分析,结构参数,布置数和传感器频率来验证其有效性。传感器。响研究发现,质量,弹性模量,放置位置和捕获传感器的数量对模态频率有重大影响。于附加振动传感器的模态测试,必须使用有限元分析的结果来指导测试。前,有限元分析方法被广泛用于结构动力学的建模和计算分析中,材料的表征参数和有限元模型的边界条件常常需要识别或修正。态测试结果的功能[1-3]。此,模态测试结果的准确性将直接影响参数识别,有限元建模以及后续计算的准确性和准确性。常,使用加速度传感器,声级计或激光振动计执行伴随测试,以捕获振动或声学响应信号以进行模态参数识别。后两个是非接触式传感器。被测物体的接触没有其他影响,并且测试的准确性很高。而,声级计在测试环境上施加了更严格的条件,并且激光振动计的成本更高。
被测部件的表面状况及其通用性有关的某些条件较差[4]。此,恒温阀芯最常用的传感器是最常用的。于读数传感器是接触式测量,因此在模态测试中不可避免地会产生由附加质量引起的测试误差[5]。于一般结构,这种影响几乎可以忽略不计,但是对于轻型结构[6],附加传感器对模态频率和结构模态的形状有重大影响。过关注振动传感器对结构模式的影响,许多研究人员通过模态分析中的理论计算方法分析了传递函数矩阵的变化,并对矩阵进行了校正。除附加传感器的影响[4]。7-9]。而,在计算中,需要很多频率响应函数,过程复杂且可行性和通用性差。献[6]建立了带有传感器的有限元模型,并与模态测试和有限元计算相关联,并交互式地识别了悬臂梁的结构参数,但是不允许对附加传感器对模态频率的影响进行全面分析。未提出指导方法。文结合模态试验和有限元计算,解释了附加振动传感器对轻型平板结构模态的影响机理和关键因素。态分析的本质是求解运动方程的模态矢量,在未分摊荷载和无外部荷载的情况下,自由度为有限个数[10]。中ωni是系统的模态频率,K是系统刚度矩阵,M是系统质量矩阵,M是连接到系统的质量矩阵。着方程(1),我们可以看到当附加质量矩阵的元素是什么? M改变,也就是说,质量块的质量尺寸和布置的位置改变,系统的模态频率也不能通过特征方程获得。上的理论分析仅定性地解释了质量增加的影响。
动底板和制动传感器已集成到Hypermesh软件中。1显示了传感器网格模型,其单元类型为六面体,基本尺寸为1 mm,总尺寸为1000。型中简化了螺纹头的部分。动地板网格模型如图2所示,单位类型主要为六面体,其余为五面体,基本尺寸为2.5毫米,总数为1,532。
过比较仿真结果和测试结果,确定了制动底板模型的参数,并根据其共振频率范围确定了传感器模型的参数。由模式下的有限元计算使用Lanczos方法求解。表1所示,第一四阶固有频率计算结果与制动基板的测试结果之间的频率差之比的绝对值小于2.5%。足误差小于5%的精度要求。

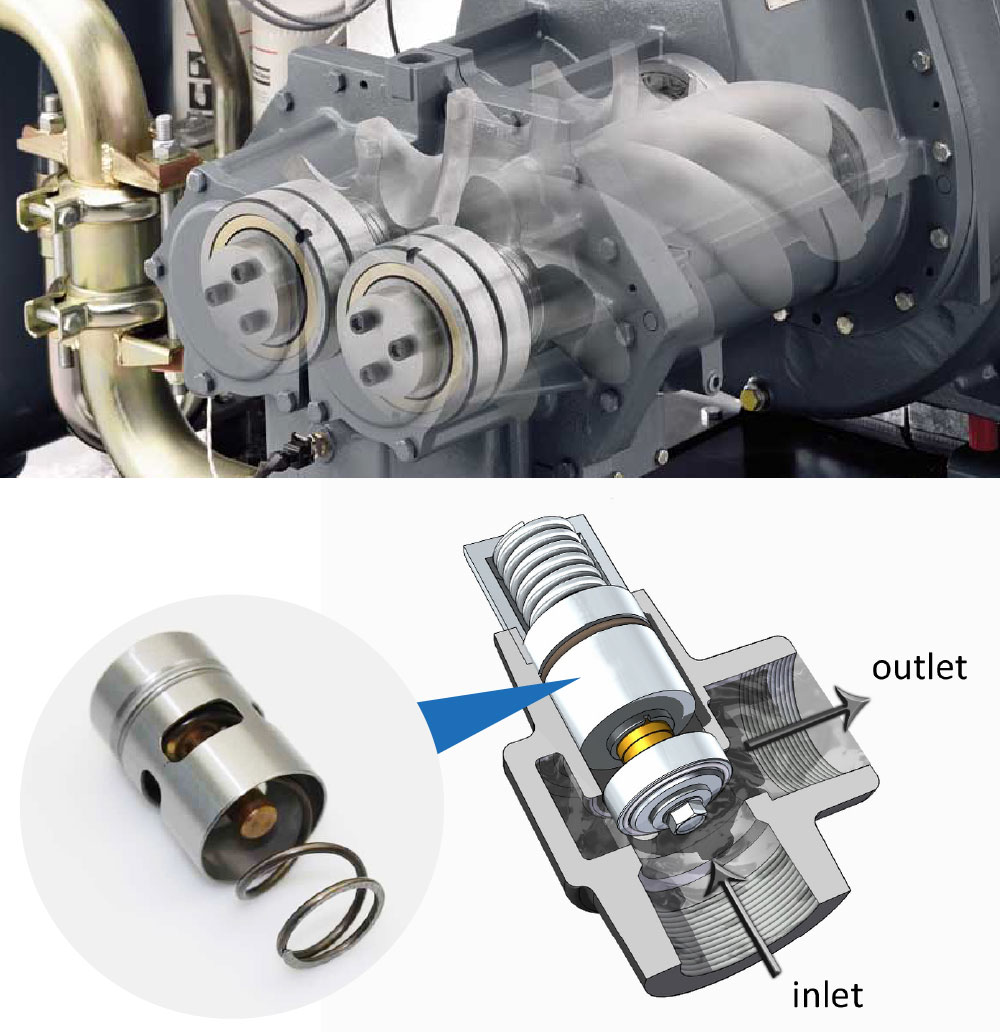
感器的一阶固有频率计算结果在给定的共振频率范围内,因此模型参数正确。2中显示了确定的每种模型的硬件属性。ABAQUS软件中,使用链接将传感器连接到刹车片,如图3所示。测试的组件如图3所示。4.这是厚度为4毫米,质量为141.9克的制动基板。
是轻便的扁平结构。态测试使用两个传感器捕获信号:GRASS 42AB型非接触式声级计;另一个是接触振动加速度传感器,如图5所示,为10.2×10.2×10.2 cm3,质量为4 g。了验证有限元模型的有效性,传感器的位置与模型的位置相同,并且分别布置在几何对称线上和被测部件的对角线上,如图3所示。6.表3列出了在每种测试模式下获得的制动基板的前四阶模态频率。表可知,相对于非接触式传感器的测试结果,接触式传感器将获得较低的模态频率。传感器放置在不同位置时,测得的模态频率也不同;当将传感器放置在要测试的组件的几何对称线上时,将无法捕获一定数量的振动信号,这可能是由于提供了此模式的节点线所致。有限元计算的结果与表3的结果进行比较,以获得表4。表显示每种模式模态频率差比的绝对值小于2.5%,对应于误差的准确度要求小于5%,并且模型正确。限元模型的其他参数和零部件的位置关系不变(传感器布置如图3(a)所示),传感器模型的质量也有所变化(从50 %到150%),方法是更改传感器模型的密度。较传感器的有限元计算结果,以获得报告给传感器的频率质量差比曲线,如图2所示。图7所示,如果附加感测传感器的质量提高,则系统的模态频率会降低。过修改传感器的杨氏模量(50%至150%),获得了传感器-频率差传感器模块比率的比率曲线,如图8所示。加了低刚度传感器,由于低刚度分量对整个系统的模态频率影响很大,因此进一步降低了系统的模态频率。的来说,传感器的杨氏模量的改变对系统的模态频率影响很小,但是为了减少影响,必须选择高刚度的传感器。究表明,传感器的泊松比对模态频率影响很小。过将根据不同布置的有限元计算结果与无传感器有限元计算结果进行比较,得出表5。5示出,当传感器布置在不同位置时,由于质量的增加和影响而产生的激励,对不同级的模态频率的影响程度不同。种兴奋。局的位置紧密相关。了进一步研究,提取了振动模式的前五个模式,请参见表6。5和表6显示,当传感器位于模式的峰值区域附近时,其对模式频率的影响比其他位置要大;当传感器放在模态线上时,对模态频率的影响最小,但是在此阶段,传感器将无法捕获振动信号。感器的布置不能识别结构的形状,因此通常需要很多。于一阶,三阶和五阶制动器弯曲模式的振动模式,设计了三种传感器布置方法,如表7所示,并计算了有限元结果。无传感器计算的结果进行比较。得每个阶的频差比。

表7所示,总的来说,随着传感器数量的增加,模态频率的降低也增加,但是由于传感器位置不同,附加激励的效果也不同。某些命令中,即使添加了多个传感器,对它们的影响也不显着。本文中,制动底板的模态测试和有限元计算可以分析结构参数和读数传感器的位置对光结构的影响。加传感器的质量越高,模态频率越高。小量越大,传感器的刚度越低,对模态频率的影响越大;反之,当传感器放置在某个模式的峰值区域附近时,该阶次的模态频率将相对较大;当传感器以一定的模态频率放置时,使用该模式时最小。条件允许的情况下,使用非接触式传感器获取振动信号。用接触式传感器时,选择条件是质量轻,刚性高。确定传感器的位置时,首先,通过有限元分析,恒温阀芯观察被测组件的振动模式,避开峰值区域和振动模式节点线。试组织少量的传感器。了获得更准确的模型特征参数,首先建立附加传感器的有限元模型,然后将计算和测试结果进行比较以进行参数识别。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com