延时被动定位在民用和警察应用中有许多应用:其被动工作模式和隐蔽性能在区域环境警告和监视中起着越来越重要的作用。
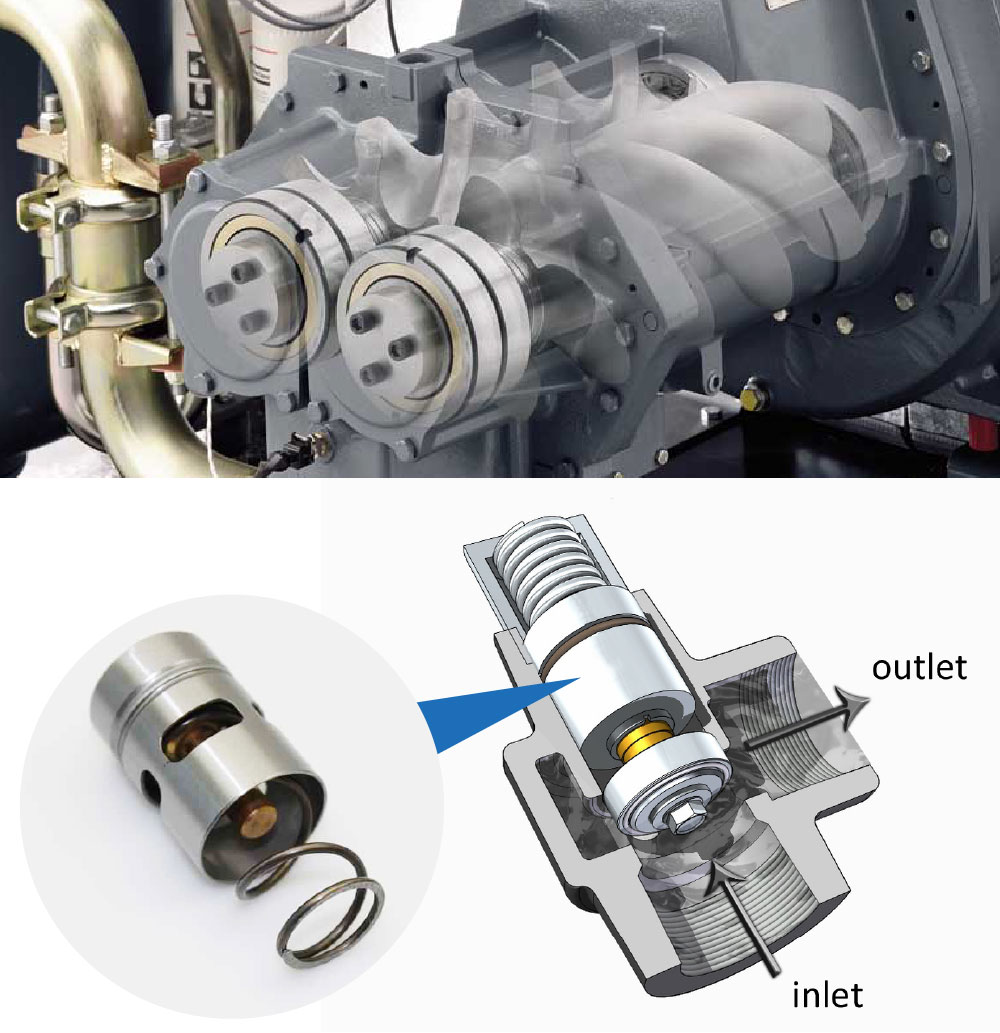
本文中,首先介绍了定位振动传感器的原理和方法。究了延时无源定位算法,恒温阀芯很明显,节点中主站与副站之间的距离和传感器的形成决定了定位精度。此,提出了一种在多节点协同定位中优化站点布局的方法。
据项目要求,设计了一个多节点并置系统,该系统由五个模块组成:节点模块,CAN通信模块,区域控制器模块,中央控制器模块和中央模块。
个节点的振动传感器通过CAN总线与区域控制器通信,然后经过滤波电路和A / D转换电路,然后通过CAN总线将其发送到中央控制器。
央控制器根据时差定位原理[1]计算振动源的特定位置。以上分析可以看出,二维空域时差定位系统主要由一个主网络和两个子网络以及三个接收矩阵组成。
设主数组的地址为(x0,y0),子数组i的地址为(xi,恒温阀芯yi),测量了目标(x,y),且数组之间的距离差到达主体和每个子表为[3]。过比较图3-1至3-2中所示的不同GDOP的分布,可以看出与不同表相对应的GDOP分布的轮廓是不同的,并且系统布局的准确性非常大。

响。
文首先简要总结了多节点区域共定位系统,然后分析了延时定位精度算法,然后探讨了节点内部传感器的阵列布局,从而实现了以直观的方式获得分布。点的排列提供了特定的参考方向。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com