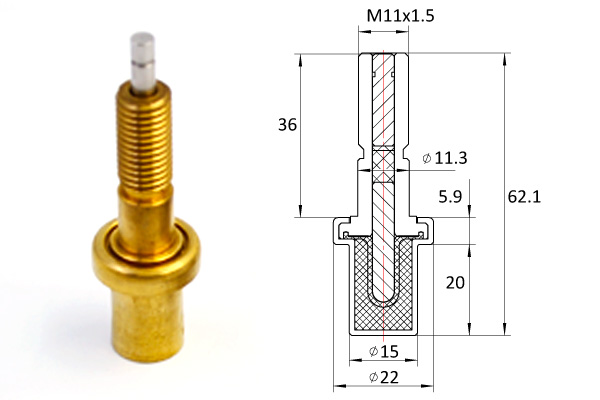
为了研究预阀门负荷传感系统的动态特性,建立了负荷传感泵和预阀多通阀的AMESIM数值模拟模型,研究了该系统的特点。不同的操作条件下分析饱和状态的原因。对阀门前补偿负载敏感的系统的抗饱和度研究提供参考。负载的敏感性;预阀补偿;模拟;饱和流中图分类号:TU603文献标识码:A文章编号:1003-5168(2017)08-0060-03Caractéristiques分析系统对收费补偿阀avantHu新乐敏感(机械与电气工程学院,中南大学,湖南长沙410083):研究一个敏感的系统加载的阀预补偿的动态特性,AMESIM泵响应负载和预补偿阀的数值模拟模型例如,分析了系统在不同工况下的动态特性,恒温阀芯分析了饱和状态的原因,为预补偿负载敏感系统的抗流饱和提供了参考。负载,预阀补偿,模拟,系统敏感的饱和流量负载,越来越多地用于液压系统采用闭环压力控制,压力跟踪效果好。于梭阀网络,敏感泵选择了多个执行器的最大负载压力反馈,然后释放压力。提供系统所需的压力,并且还抑制旁通流量的损失。其他类型的控制系统(正流量,负流量)流量控制系统相比,节能效果良好。阀补偿系统继承了传统预阀补偿系统的负载灵敏度,并具有自己的性能。外部负载波动时,补偿阀通过调节主阀前后之间的压差来控制液压系统的流量。
量分配确保了系统的稳定性。此,在正常运行条件下,预阀补偿系统具有良好的速度控制性能。工作条件复杂时,系统的流量饱和,也就是说它不能遵循执行机构,这会导致执行器的减速或停止。了分析这种工作条件,建立了AMESIM数值模拟模型,主要包括负载敏感泵和多通道预阀补偿阀,以分析多动态的动态特性。掘机执行器在不饱和和饱和条件下同时进行。[1,2]。载敏感泵数字模型负载敏感泵的原理如图1所示。要部件有:1。量控制阀,2。压阀,3。型可变气缸,4。型可变气缸,5。流阀。图中,泵压力是负载所需的压力。正常操作条件下,流量控制阀是力平衡的,其孔口关闭,系统压力和负载压力保持一定的压力差。负载所需的压力值增加时,流量控制阀右端的背压增加,阀芯向左移动。变量缸连接到燃料箱,摆泵盘的旋转角度增大,流量增加;同样,当负载所需的压力降低时,背压降低,阀芯向右移动,油压进入大的可变气缸。塞泵盘的旋转角度减小,流量减小。负载压力过载时,压力截止阀打开,油压进入大的可变气缸。时,泵输出保持正常系统运行的最小流量。外部负载不存在时,系统压力仅为流量调节器弹簧的压力。20bar,流量几乎为零[3,4]。据电荷敏感泵的主要分析,负载感应系统主要包括三种运行状态:一般运行状态,系统压力仅提供负载所需的压力,在保持压力的状态下,系统达到最大压力并且流速仅降低以维持系统的正常操作。小流量;处于非活动状态,系统的输出速率几乎为零。
据泵响应泵和泵参数Rexroth A10VNO系列的原理,该模型如图2所示。图2中,P对应泵的压力输出,Pls是最大负载压力返回,1到可变尺寸气缸,2到流量控制阀,3到压力截止阀。义数值模型的主要参数,使质量质量为0.02 kg,流量阀滑块和压力截止阀的直径为7 mm,杆的直径为4毫米。统压力余量是通过调节14巴的控制阀débit.Selon力士A10VOS参数的预载荷控制,泵出口压力总是保持在14巴的与压力的余量最大负荷。力关闭阀也通过弹簧预紧力调节。大系统压力为300 bar。
果系统压力大于300 bar,压力截止阀打开,泵流量进入大气缸,压力盘旋转角度敏感泵减少,流量开始减少,这与原则上的压力维持状态一致。验证模型的准确性,请模拟相应系统时间的向上和向下压力。力增加阶段的模拟时间约为45毫秒,这与官方时间40毫秒略有不同。
降阶段时间约为20毫秒,这与官方的20毫秒时间一致。符合要求,表明敏感泵模型基本正确,可以在以后使用。索。有阀门补偿模型预阀补偿的多路阀的原理如图3所示。双向执行器为例,每个接头通过伺服阀选择最大负载压力并返回到电荷传感泵的流量控制阀,以确保系统压力在最大负载压力范围内并保持一定的压力裕度。节流阀放在其前面之前,泵的流量首先通过补偿阀,主阀的压力施加到补偿阀的侧面,然后通过主阀瓣在补偿阀的弹簧腔侧施加压力。
力平衡保持在左侧和右侧以起压力补偿功能,从而设定主阀前后压力差,不受变化的影响主阀的开口尺寸用于调节致动器的流量。压力扼流圈[5]。路预阀阀使用由Dipma生产的BLS6系列多通道阀进行分析,Dipma是一种带有预阀补偿阀的多路阀。构和多路阀的原理,建立了多通道阀门。门型号,换向阀作为先导压力油作用于阀芯的两侧,推动滑块,移动,改变阀口流动区域和区域阀口流量改变主阀的流量特性并控制流量。
芯两侧的导向力由实际先导压力和阀芯直径计算,最大压力为40 bar,滑动位移为8 mm。转阀模型中的孔板,弹簧刚度,喷射角度和阀门流动面积参数通过模拟过程的提示进行优化和调整并比较结果。转阀的定向流动方程式:在上式中:流量系数,W是反转阀孔口面积的斜率,阀门前后的压差反转,油的密度。上面的公式中,流量系数设定为0.7,节流阀节流区的斜率设定为固定值,并设定油的密度。有阀孔前后的压差对系统有一定的影响。是,预阀补偿阀调节节流阀压差。着负载的变化,补偿阀改变阀口的大小,节流调节前后的压差保持不变。据上面的公式,节流阀的流量保持恒定。度控制性能良好。统动态特性分析不饱和条件下挖掘机多执行机构同时动作系统的动态特性。
执行器在不饱和条件下的动作,同时采用挖掘机的斗杆和铲斗。负载执行器,铲斗负载2是低负载执行器,在两个机构运行期间负载不变,模拟系统的流量不断增加,最终达到所需负载的最大流量。制阀的先导信号为0至5s。加到40,速率逐渐增加,模拟时间为5秒,时间步长为0.01秒。得如图4所示的系统的动态特性曲线。4示出在图4a中的泵的输出不saturées.Le流动条件由多个致动器的同时操作得到总能满足chacun.Le高吞吐量的要求的系统特性曲线比低流显著下负载电荷(即使是大型电荷补偿阀也参见图4b)。屉完全打开并保持低于低负荷流量.2秒时,大负荷补偿阀完全打开,流量保持稳定,不再上升。不饱和条件下,所有负载执行器都可以平稳运行而不会减速。象正在运行。析不饱和条件下挖掘机多执行机构同步动作系统的动态特性:举例来说,在饱和条件下铲斗与斗杆的联合作用,每个负荷执行机构的压力为始终保持恒定,主阀的先导压力小于5 s。0~20 bar,阀门口逐渐打开,流量逐渐增加,模拟时间步长为0.01 s,模拟时间为5 s。抽屉被打开时,系统变得不稳定,由于死区并连接fluctue.Lorsque系统稳定各个流的系统。的反应时间,高和致动器的流量之间的关系小电荷按比例分布,约1.5秒。达到饱和状态时,泵产生的所有速度和高负载时增压器的流量开始下降和小进料速率持续上升:3秒后,在高充电速率为零时,流低负载达到最大值,系统会出现一些流量损失。减少高负荷致动器的流动的过程中,致动器缓慢地操作并且在约3秒后最终完全停止。操作状态下,致动器的操作速度几乎不波动并且稳定性良好。铲斗在不饱和条件下具有良好的流量分配功能,并且系统运行稳定,而负载敏感系统的压力仅提供系统所需的压力和系统的性能。能是好的。饱和条件下,挖掘机的多个执行器同时运行,系统压力裕度减小,基础压力等于最大负载压力。统压力不足。速率请求增加时,系统达到最大速率并执行大负载。构的流量开始减小,小负载的流量继续增加,并且流向低负载致动器的所有流量的流量为零。掘机必须避免这种工作状态,并确保系统的稳定运行。考文献:[1]王秀君,胡建军,高伟正,等。载敏感多端口阀的数学建模与分析[J]。动与液压密封,2013(11):15-17 [2]张立杰,王立航,李德新载荷传感阀预补偿系统的基本分析[J]。压与气动,2015(7):63至67. [3]王艳,胡俊科,杨波。载敏感泵动态特性分析与仿真研究[J]。
代制造工程,2008(12):84-87。[4]徐志刚。载敏感泵控制系统流量控制方法研究[J]。压气动,2014(12):51-54。[5]李德新挖掘机LS系统的实验仿真与反饱和技术[D]。皇岛:燕山大学,2015。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com