ABB的智能定位广泛,由于其稳定的工作状态,其故障率低,其众多的功能和灵敏的操控特性适用于几乎所有的自动化行业。而,调试过程中存在问题,包括的阀门和治疗方法的位置的波动一直是一个难点和重点。文通过对作者对发电厂和相关媒体的网站协商调试及借鉴的发展这些问题。ABB智能定位器;阀的位置;振荡;火电厂中图分类号:TM621文档号:A文章编号:2095至2945年(2018)17-0125-02Résumé:ABB智能定位器,广泛应用于自动化的几乎所有领域。

门的位置和它的治疗方法的振荡的问题总是困难和阀门位置和治疗方法的振荡priorités.Le问题,在笔者,是总是问题和优先事项。验,在电厂现场的调试和咨询对于这类问题的关键词的详细说明的相关信息:ABB智能位置,阀位,挥杆,热电厂引进的生产热能在中国能源生产的主要方法。热电厂的自动控制系统,该控制阀的选择是由智能定位致动器的阀位置的整个系统。整的操作至关重要的定义的参数该系统的重要功能(温度,压力)。流速等),以获得可控范围,以满足监管要求,确保安全生产。
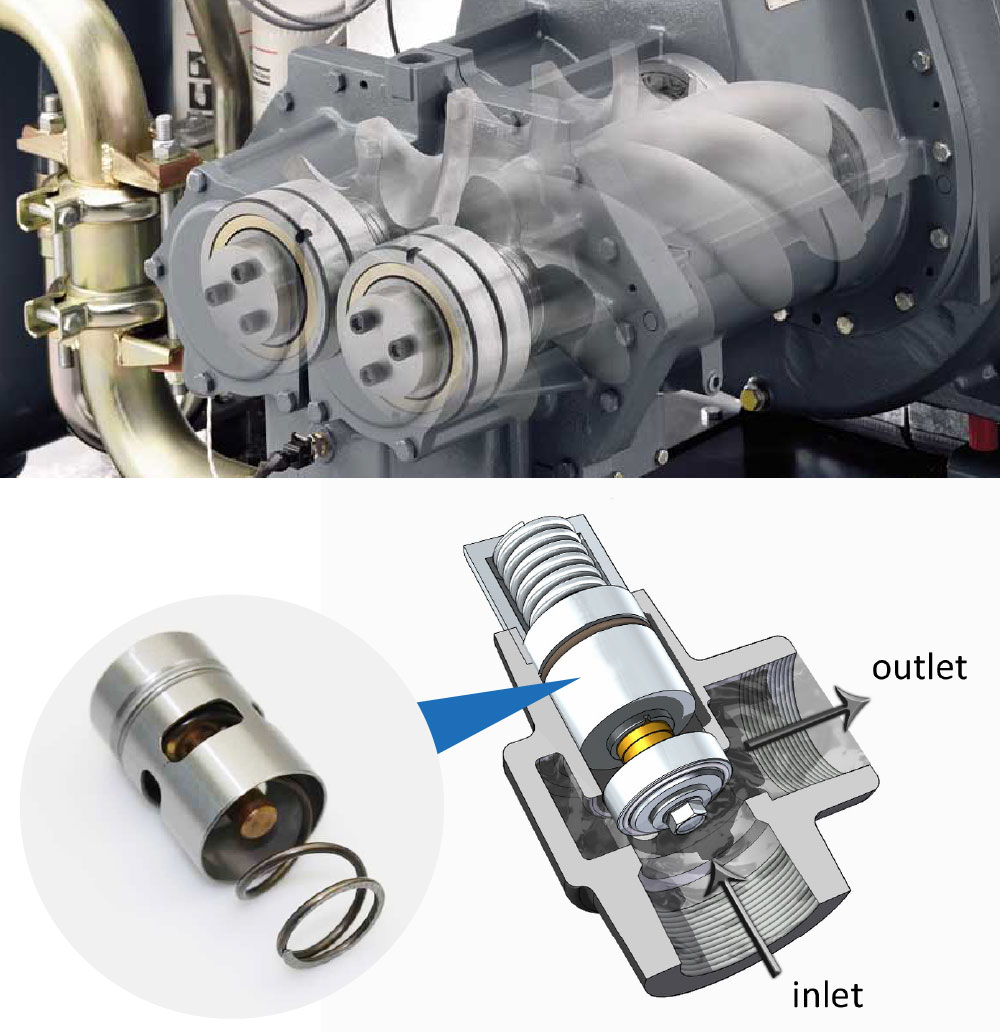
公司建立了中央煤炭,液体宁夏的水控制阀过热已经选择了ABB的TZID系列软件3.0版本,采用微处理控制提供一流的智能定位器操作精度,操作简单。于现场更改运行参数的特性。文档包含调试人员将降温器和门过热的水的调节中的发展过程中遇到的问题,解释的原因和解决方案,这些现象的根源。造成的ABB定位和治疗由空气泄漏的阀连接气体管线到定位器或定位器定位器泄漏模式的的振荡方法的阀位置的振荡的原因的分析手动控制,该阀的位置振荡。气体供给管连接到所述定位器或定位器软管连接到阀,并在中间位置打开它填充有肥皂水甲浇水喷雾,以查看是否有泄漏,如果泄漏。封处理的时间,然后保持在中央位置的阀1分钟,以检查阀是否是稳定的。块I / P定位器本身的质量问题,确认有在每个接头处没有消失点后,发现的是,阀仍然振荡时,定位器输出的流水线是除去,给出的定位器的一定的位置,等待1分钟检查定位器可以被调节,并且有空气的这样的情况发生sortie.Si的流动,更换模块I / P定位和内部问题将得到解决。装和接线复位杆问题失去视觉反馈或手动摇动复位杆,以使控制阀被致动和释放。果控制阀可以返回到其初始位置时,返回杆是正常的,否则返回杆被释放和复位杆必须重新安装。
定位器的电路板的端子松动,或当流水线控制阀范围内时,电源突然切断和布线缓慢恢复到检查连接是否松动。位器的端子被焊接到印刷电路板。少有焊点,有时连接运输或布线期间断开疏忽,并且端子连接如果出现这些情况下,有必要重新布线和更换电路板。看。果微调控制阀是严密,控制阀的磁盘可能无法正常工作。控制阀被致动,当超过信号和阀位置可一次返回到给定的位置,这会导致控制阀的振荡之前被改变。组必须接触,以解决该阀的主体中的适当位置。PID调谐问题设置DCS PID参数不恰当,导致阀位置的振荡。
果控制阀在自动控制模式而变化,也不会切换到手动模式后振荡,一旦自动指示DCS设定PID参数是不适合的传递。们必须找到相关工作人员正确设置DCS PID控制参数的值,这个问题将得到解决。位PID参数本身的设置是不恰当的。果控制阀在自动控制模式而变化,切换到手动模式,始终执行。除了上述原因后,可能需要调整定位器本身的PID参数,由于PID智能定位。数设置是非常复杂和费时的,它需要大量的时间和实验,让我们着眼于这一点。以前的版本V2.0 ABB定位器,你可以设置GOPLS的值,它对应于差分调整。参数可以改善瞬态响应。可用于普通控制阀。
设置可导致振荡,通常设置为0。参数的设置已在定位的V3.0版本被取消,主要是由P7.0的值调整到P7.5来达到控制的效果。P7.0和P7.1的KP值是用于缩放打开和关闭的方向上的因素的影响,它是控制器增益。KP值将影响控制设置的稳定性。值越高,调整速度快。果KP值过大时,致动力过强,从而导致过度调整,较长的调整时间和振荡。于大多数执行器,满意的控制动作可以与2.0和10.0之间的KP值来实现。
补偿在控制系统中的不对称,KP值必须在两个方向上被定义(打开和关闭)。P7.2 TV值和P7.3对应的设置集成分别打开方向和关闭时间,和它们的值影响速度和稳定性,然后动态地影响所述值KP。加值将降低电视控制速度。了补偿在控制系统中的不对称性,TV的值必须在两个方向上(打开和关闭)来设置。P7.4和值P7.5Y-OFS(P7.6和P7.7在版本2.0)对应于位置激活和去激活的方向偏移的设定,而“输出信号的移位”将用于I / P模块的行为是线性,甚至小的控制偏差很快得到解决。值的下限由足以影响具有小于5%的控制的差的速度控制的最小值确定的。手动模式P1.2和P1.3,这个偏移用于模块I / P的大缓慢移动的致动器的精细调节,自动调整的可能性确定的值大于80%。这种情况下,在手动模式下粗和细设置不显著不同。了补偿在控制系统中的不对称性,偏移值必须在两个方向上(打开和关闭)来定义。
于大多数致动器,可以用40%和80%之间的偏移值来获得满意的控制动作。果设定点控制稳定性小于超过2%,两个偏移值应该减少。门控制水的过热发展的过程中,笔者发现,定位始终在调整,溢出接到命令后。于阀定位器的湍流的主要原因在于,调节力过大,从而降低了值KP和减缓阀门。

定速度,振荡的情况是改进的,但反应时间长。如,具有20%的控制,阀不会立即接收到commande.Après秒后作用,阀开始移动并即将达到20%。头的速度再次变慢,接近设定阀位置值一点。于水控制阀的过热应该允许温度的实时的调节,需要一些调整速度。此,一些KP值被相加和阀开始振荡。当提高价值电视之后,我们看到,振荡的变化并不明显。扩增340和振荡仍没有明显改善,该值主要用于消除稳态误差,提高订单的准确性,也就是说,对于达到一定的设定。

阀的位置的误差进行调整,直到该误差等于0。此,设置用于当其它值被设置不正确其他测试值会造成错觉,以为“这个数值不工作”,而值实际上是如果未正确设置的值,副作用是难以如果该值过小,动力性能通过积分动作本身迅速纠正该系统的输出会变差,导致不稳定的系统。除稳态误差所需要的时间将太长,我通常240和360,这被认为是一个合理的范围之间配合。续当调整偏移调整其它参数,可以发现,改变5%的因子的值将导致显著变化,有时会导致“哮喘”的所述阀中的发病率很高,所以这种变化是0.5%。小该值并测试阀门几个fois.Lorsque阀的振荡明显减弱,以0.1%的准确度调整,直到阀不再振荡。
试打开行程,并分别向闭阀行程。果阀门是稳定的,保存它。果出口阀门仍然振荡在某些时候,继续下去,直到阀在所有点稳定平衡以上三个参数。他可能的原因定位器使用自适应模式在长terme.Le未对准操作导致valve.The自适应控制模式的位置的振荡是一种遥控的用于消除超支或调整fréquents.Le控制模式下接收4-20mA的DCS。信号自动调整和定位器的内部参数可以是自教导和corrigés.Les定位控制参数被自动调整到操作条件,以获得最佳的可能条件。而,由于自适应模式通过操作许多因素的影响,长期工作会导致对应不足:它建议使用工作模式几个小时(当给定的信号DCS超过一个星期经常)或没有变化。(当由DCS很少改变所提供的信号),定位器然后改变到固定控制模式。于阀和水阀降低过热之间的压力差过大时,阀位置振荡。果上述方法仍然不能解决阀位置的振荡的问题,有必要确定是否有一个阀选择问题。降低,如迷宫阀。述阀的选择,而在以前的设计阶段被确定,并且通常将不被替换。很好理解。之,在ABB定位阀位置的振荡的原因是多种多样的。
决这些问题是一个非常复杂和繁琐的任务,设置参数时尤其如此。做到这一点,我们必须掌握的调试技术方面的,知道的结构特点和ABB定位的不同功能,积累实际工作经验不足,反复练习,多想想,恒温阀芯以减少时间分辨率这样的问题,保证火电厂。个系统运行的稳定性。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com