微泵是微流体系统的关键组件,广泛用于生物流体处理和微电子冷却等领域。研究的目的是模拟新型无阀微泵的作用机理,旨在有效克服低雷诺数下的流体动力学可逆性。过扫描参数系统地分析了微泵在不同激励频率和振幅下的净泵送速率的影响。较结果表明,净抽速随着激励源振幅的增大而增大,激励频率对净抽速的影响较小。流控;没有阀门的微型泵;有限元;数字仿真;流量控制CLC TG142.7Design和新微型泵的特性分析,无FAN HaixuanAbstract阀的微型泵是微流体系统,其被广泛使用在生物系统中的重要组成部分。计了一种新型无阀微泵的机理,克服了低雷诺数下的实际倒流量,分析了不同频率和激励对微泵泵流量的影响。数。果表明,随着激励源振幅的增加,泵浦净体积增大,频率对微泵流量影响不大。键词微流体,无阀的微型泵,有限元法,数值模拟,微流体流动系统的基本组成部分,该流动控制微型泵是不可缺少的流体控制和微流体技术的发展的标志。用于航空航天,分析试剂,生物医学领域和其他[1-3]。据阀门的存在与否,微型泵可分为阀式微型泵和非阀型微型泵。
型泵具有微型泵的工作原理相对简单,加工工艺成熟的特点。而,提升阀微泵不可避免地在工作过程中带来高频摩擦和设备装置疲劳,影响其工作效率[4]。有阀门的微型泵结构简单,新原理:外部激励源下的流体流动响应良好,避免了泵腔内零件的应力。些优异的特性使无阀微泵具有重要的发展潜力[5-6]。系统的雷诺数较低时,许多无阀泵设计效率低下;因此,它们不适用于粘性流体和低流速或低流速的应用。

主要是由于没有阀门并且难以在给定方向上获得连续流动。对这一问题,本研究旨在将新型泵腔与线性弹性部件相结合,并利用部件的弯曲变形来达到精确流量控制的目的,进一步提高性能。型泵[7-8]。阀微泵的结构和数学模型基于线弹性材料的弹性力学性能和流体力学,采用有限元法构造了弧形无阀微泵模型,如图2所示。1.周期性流体从入口界面进入弧形微泵泵室,然后进入弧形主管,分成流入泵腔的两种流体,离开限制Outlet1输出和Outlet2输出以获得流畅的周期性。水。微泵泵室的主管的环形半径分别为R = 150微米和r = 50微米。两根弹性杆连接到管壁和内径中心的线与水平方向形成45°的角度θ,线性弹性杆的终点距离芯的中心100μm环形,以及线性弹性杆材料的密度为970 kg / m3,泊松比为0.5,杨氏模量为3.6×105 Pa。运行状态微型泵处于层流状态,Navier-Stokes方程中的惯性项可以忽略不计。此,泵腔中的流场可以用斯托克斯方程和连续性方程来描述,表示为:Ρf=▽·[ – pI μ(u ▽uT)](1)和▽·U = 0(2)其中,ρ是流体的压力,I是一阶张量,ρF是流体的密度,μ是流体的粘度,u是流体流速和▽UT是矩阵你的易位。在出口处Outlet1和Outlet2输出的边界条件如下:P0 = 0 atOutlet1,Outlet2(3)微型泵的软管,而不被设定为防滑限制的阀壁,即: ufluid = 0(4)的基础上在杆的变形被描述如下线性弹性的弹性:ρsolid= – ·δ(usolid)= 0(5)在微型泵的操作的不带阀的期间,流输入输入接口,输出速率Output1和接口输出的输出,时间随迁移而变化。
了更好地表征微泵的流体泵送性能,从左到右选择流体泵送的正方向,然后集成Outlet1输出和Outlet2输出之间的接口以获得流速的界面处,表示为:UoutL = – U(ufluid)* W(6)其中UoutL是在输出接口Outlet1速度,ufluid是在x方向上的速度分量,而W是该区域的宽度选择。似地,Outlet2输出接口上的流量可以表示如下:UoutR =∫(ufluid)* W(7)的净流体流是完整的微型泵:UoutNet = UoutR-UoutL(8)结果与讨论本研究是基于基于所述运动特性的线性弹性杆的互易性,无阀的微型泵为基础的药物运输是conçue.Le振荡流在线性弹性变形杆发送到微型泵凹陷通道。过线性弹性杆的弯曲变形来改变泵中的流体输送流。型泵以“抽吸”和“泵”模式周期性地运行并在一个方向上产生净流速,允许在不使用外部流量控制器的情况下方向控制流体流动。解决了传统微型泵在工作条件下难以自启动的问题。

励幅度对泵送速率的影响基于参数扫描方法:建立激励幅度下的三种微泵仿真模型,蒸馏水为在微型泵的环境中选择作为泵送流体。该外部激励被设置在入口处的速度是:U01 = 6U×S×(1-S)×SIN(2πT),U02 = 12U×S×(1-S)×SIN(2πT), U03 = 6U×s×(1-s)×sin(πt),其中s是局部变量,U定义为平均输入速度,即0.16m / s。2A和2B是U01下T = 0.24S和T = 0.76S的流场,图2C和2D是T = 0.24s和T = T的流场。U02下0.76秒。图2中可以看出,泵室中的流场速度达到正的最大值(从正向的左到右)到T = 0.24s并且流体的流速达到T = 0.24s。2C中的(0.45m / s)要大得多。图2A中,流体流速(0.2m / s),在这种状态下,弹性杆的变形也更强烈,也就是说外部激发源的频率恒定,激励源的振幅更大,泵送流体作用于线路。性杆的液压力更强,左侧的线性弹性杆朝向曲率发展更大的,其进一步抑制泵中的流体从出口1流动,并且右侧的线性弹性杆受到流体的液压力。近连接侧的管子内壁的方向弯曲,使得进入入口的大部分流体可以容易地从出口2流出;在图2B和2D中,泵室中的流速约为T = 0.76秒。最大相反方向上,图2D的泵中的单位流体速度(0.45m / s)大于图2B的泵中的单位流体速度(0.2m / s),并且外部激发源被驱动到负半周期。腔中直线弹性杆的弯曲变形抑制了负驱动循环下流体的返回,而杆的左手弯曲变形线发生在流体流量低,完成流体到输入装置处于外部激发源的极限。励频率对泵流量的影响图3显示了不同输入频率下输入极限速度U01和U03的泵流量。3A和3B示出了在T = 0.24秒和T = 0.74时U01中的泵流体速度,并且图3C和3D示出了在驱动速度为50时泵中的流体速度。U02在T = 0.74和T = 1.5s。
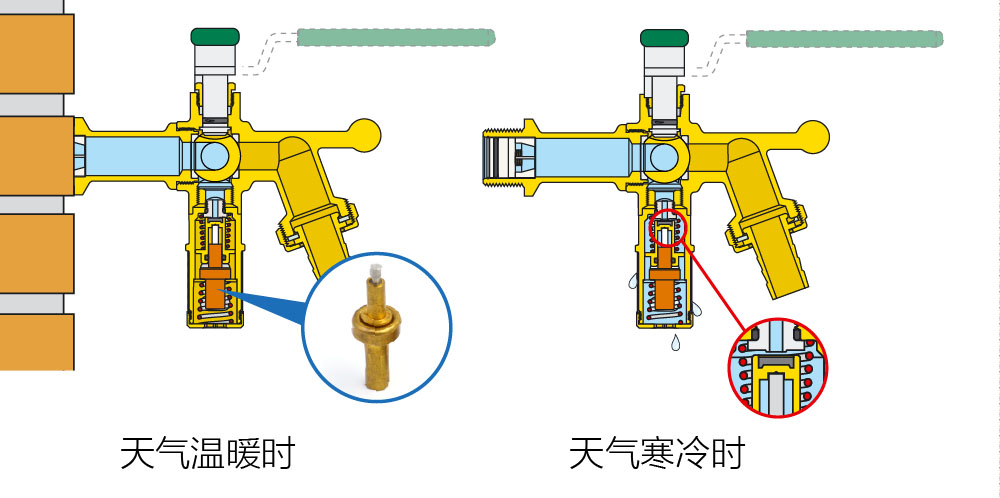
输入激励源的控制频率变化时,相应泵的循环时间也会改变。控制频率(2π)减小到一半(π)时,恒温阀芯比较图3A(当泵流量达到最大速度时T = 0.24 s为0.23 m / s)和图3C(泵中的流体速度在T = 0.74秒时达到0.23米/秒的最大速度),图3A花费更少的时间达到最大正“泵送”速率;同时,图3B(在T = 0.76秒时“吸入”最大流速为0.23米/秒)与图3D相比,达到峰值流量需要一半的时间(T = 1.5秒达到最大“吸入”流速0.23米/秒)。拟结果表明,泵室中流体的最大速度在两个不同的驱动频率下是相同的。此,当输入端的激励源的驱动幅度恒定并且激励源的频率改变时,随着驱动频率的增加,完成泵送流体循环大大减少。于微型泵的更直观地表现,让它继续2秒进行操作,选择的方向从左至右(输出输出1点到输出2输出)作为流体输送的正方向和集成流体速度到两个输出限制。别获得UoutL和UoutR,并获得净泵送速率UoutNet的差值。为工作时间函数的UoutNet泵送净流量曲线如图4所示。图4可以得出结论,当外部激励源的振幅恒定时,激发源的频率减少1/2,即,数量为微泵泵循环是原泵的两倍,例如U01和U03曲线。图4中,曲线U01的泵送循环为1s,曲线U03的泵送循环为2s,这在激发源的两个频率处给出不同的泵送周期,因此微泵的净流量的泵送曲线基本相同。激发源的频率下,有效净泵送速率存在轻微差异。时,曲线U03比曲线U01更快地增加,也就是说,在高频率下,微型泵的输出特性良好且性能相对稳定。此,当外部激励源的振幅恒定时,增加激发源的驱动频率可以有效地改善微型泵的性能。论当外部激励源的频率固定时,增加激励源的振幅可以提高微泵的净泵浦速率。外部激发源的频率固定时,激发源的频率增加,这可以有效地缩短流体的泵送循环时间,改善微泵的泵送性能并提高泵的稳定性。时,激励源频率的变化对于微泵的纯泵是有效的。通影响不大。
微泵具有较高的有效流量,解决了普通微泵无阀回流的问题,为进一步研究微泵提供了参考。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com