根据矢量运动控制和旋转导向工具驱动总成的多机通讯的要求,结合电流测控技术的发展趋势,设计方案提出了基于Modbus通信协议的旋转制导工具的驱动控制器。制器采用ARM7基础架构微控制芯片,可在温度和温度条件下执行数据通信,电机PID速度控制和矢量运动闭环控制功能。中压力很大。
验室测试表明,所设计的训练集控制器具有稳定的通讯和正常运行,可以满足转向控制工具的要求。Modbus旋转转向系统矢量运动控制闭环控制方向钻井技术是当今钻井自动化领域的领先技术,该技术可根据操作员的指示显着调整井眼轨迹。过引导钻柱旋转的方法使用。高钻井速度和降低钻井成本的好处。对油田钻井作业技术需求的不断增长,中国的一些研究机构已开始研究旋转控制工具和原型开发的关键技术。2001年以来,中海油研究院一直在进行旋转转向技术的研究。成功开发了旋转导向工具原型,并在陆基油田进行了30多口井的现场测试,最初进行了技术应用。位该工具结合了旋转卡盘和非旋转壳体,通过底部微电机驱动安装在非旋转壳体上的三个导向滑块来控制导向致动器的偏心位移矢量控制。了对井下旋转可控工具的精确偏心位移进行矢量控制,安装在旋转导向工具的非旋转壳体上的驱动组件是关键部件之一。文档介绍了驱动器组的控制器,用ARM7基础架构构建处理器,在旋转控制工具的底部执行控制,数据采集和数据通信的基础上MODBUS通信协议通过集成的集成开发和模块化设计。
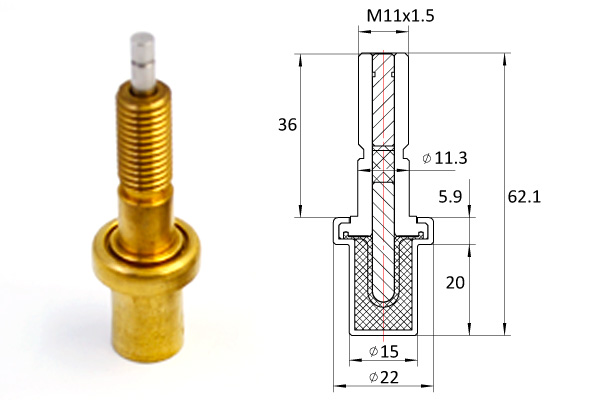
能。动组件安装在旋转导向工具的非旋转壳体上,并构成机电液压致动器系统。图1所示,主要结构包括:电动机,活塞泵,电磁阀,液压缸,位移传感器和控制控制器。系统运行时,发动机依靠底部发电机为活塞泵提供动力,使驱动组件在内部产生液压动力,驱动控制器收集传感器数据位移以获得液压缸行程的位置并控制电磁阀的打开和关闭状态。
变液压油的流向,检查液压缸的运动到规定的控制位置。转导向工具需要三个驱动组件在相邻的驱动组件之间以120°的角度轴向安装。了满足矢量运动控制的要求,驱动组件之间需要协调控制,就像集成电机,电磁阀和传感器需要实时控制和信息采集一样。动装置,使控制器的处理性能至关重要。此,在控制系统的设计方案中采用分级控制结构,如图2所示,从上到下,分为管理层,协调层和层。用。理层负责通过地面工业计算机监控和调试旋转导向工具的整个控制系统。地面调试期间,后者通过地面中央控制器连接到地下中央控制器。RS232串行接口,用于在旋转引导工具发送命令和采集数据时在地下室工作时,地面IPC将命令发送到泥浆分流器,然后通过改变脉冲来发送同时,LWD测量工具通过上升的污泥脉冲将从底部收集的数据发送到地面压力收集模块。析的数据被发送到地面的工业计算机,协调层通过安装在旋转导向工具的电子腔中的底部中央控制机进行控制层之间的数据交换,应用层可以实现对训练集的控制。练集控制器的设计在应用程序级别执行。件设计微控制单元组件控制器微控制单元使用ADI公司的ADuC7128处理器。述ADuC7128有一个32位微控制器ARM7RISC心脏用的存储器128K,数字 – 模拟转换器(DAC)10位,模拟 – 数字转换器12 MSPS比特,一个脉宽调制器16位PWM,正交编码器和输入通道。达14个信道,第二顺序和集成的可编程逻辑阵列(PLA)的低通滤波器(LPF),与直接数字合成器(DDS)32位21兆赫连接到DAC的输入端,其中,所述NAC包含此外,还提供10Ω线路驱动器,采用差分和非平衡输入模式,带有温度传感器和电压比较器,采用可成形的LFCSP格式,通过JTAG接口进行编程和调试。

源转换单元外部输入的直流电压范围如下:43V~53V根据系统电子元件的电压要求,5V,3.3V和2.5V的电压必须为由渐进式还原法生成。体实施方法如下:功率转换芯片DC / DC转换LM5010AMH驱动控制卡的外部直流电压电源电压5 V.所述ADuC7128 MCU芯片需要的数字功率因此,AP122_33 LDO芯片将以5V控制为控制板供电。压转换为3.3 V,数字电源通过30μH电感隔离,以获得3.3 V模拟电源。外,位移传感器连接到驱动器的控制板需要2.5V。以通过使用LDO ADR441B-R电压转换芯片转换3.3V电压来实现。移监测单元采用霍尼韦尔(中国)MLT系列线性位移传感器实时采集电机组件位移数据,电传感器行程为101.6mm,线性度为1%。位移传感器收集的位移信号经由由运算放大器AD8603形成的电压跟随器进入ADC的采样。BLDC控制单元使用A3930单元。成控制电路集成了整流逻辑的控制功能,几乎不需要外部MOSFET,恒温阀芯可以减少微处理器负载,提高系统的可靠性和稳定性,卡面积也很好用于安装。电动机控制,驱动控制器BLDC A3930通过芯片7128.驱动的ACU ADUC A3930驱动经由MOSFET电桥电路的直流电动机,而A3930芯片监视霍尔传感器信号直流电机,由PID控制算法校正。制系统将直流电机的速度稳定在设定值。磁阀控制单元的设计符合液压驱动控制系统的特定要求.ADuC7128 ACU芯片设计用于提供三通电磁阀控制输出。磁阀由两个UCC27424控制芯片与电磁阀并联送出。驶。UCC27424是驾驶员MOSFET高速两个相具有一定范围的4.5V工作电压至15V和电流驱动范围-4A 4A的,由于两个芯片连接平行。信单元是多机通信,因为驱动组件控制器与上协调层的地下控制单元之间的通信是多机通信,其中控制器是驱动装置是一个从动装置,中央井下控制机器是一个主要的短语。信的可靠性,通信方案使用RS485物理接口。RS485采用差分传输数据信号,具有噪声干扰,传输距离远,连接多个从机的能力。

用SN65HVD1781作为RS485接口芯片,工作电压为3.3V,传输速率可达10Mbps,SOIC封装,功耗低,传输速率高,集成度高。件设计驱动装置控制器软件程序采用C语言编写,主要由三个子程序模块组成:闭环电机控制模块,比赛闭环控制模块液压缸和Modbus数据分析模块。环电机控制模块该模块控制直流电机的运行,以确保驱动组件充分通电。件根据中央底部控制单元发送的发动机转速参考值和当前发动机转速计算两者之间的速度差;如果速度差大于阈值,则电机根据PID算法加速或减速,直到电流电机速度达到电机速度设定值。PID控制是基于给定值r(t)和实际输出值c(t)的控制偏差:e(t)= r(t)-c(t),偏差的比率( P),积分(I)和导数(D)通过线性组合形成控制量以控制受控对象。PID控制的控制律如下:其中:KP – 比例系数,TI – 积分时间常数,TD – 微分时间常数。压缸行程闭环控制模块该模块通过检测位移传感器的值并将其与液压缸发送的液压缸的目标排量目标值进行比较来检测当前液压缸行程数据。流驱动组件的电磁井下中央控制单元。
制阀的打开和关闭以改变液压油的流动方向,使得液压缸可以在限定的位置操作。Modbus数据分析模块该模块用于处理驱动组控制器和中央井下控制单元之间基于Modbus协议的数据通信。Modbus协议最初由Modicon于1978年开发。已成为电子控制器的通用语言,广泛应用于工业自动化,具有开放性和简单性的优点。Modbus协议是一种主从通信协议,可以配置主机和最多247个从站。站必须接收来自主机的请求以与主机通信,并且不能发起通信请求。器之间的通信是不可能的。Modbus协议规定主机可以向多个从设备发送请求,每个从设备都有自己的8位地址代码(地址代码范围1-247),这是唯一的。Modbus有两种信息传输模式,RTU模式(远程终端)和ASCII模式。于RTU模式可以以相同的通信速率传输比ASCII模式更多的数据,因此在控制系统中选择RTU模式。
RTU模式下,传输信息帧之间的时间间隔必须至少为3.5个字符,波特率为19 200 bit / s,信息帧由四部分组成:地址从机,功能代码,数据和CRC控制。验结果为了测试驱动器组件控制器的性能,测试原型在实验室进行功能测试测试,重点关注控制器的数据采集,通信和控制性能。配驱动器。试结果表明,驱动控制器可以对每个执行器进行控制,并且通信接口可以正常运行。论本文基于简单的体系结构,强大的集成,高集成度,稳定的通信和高抗干扰能力,提出了一种基于ARM7架构和Modbus通信协议的控制器技术解决方案。以适应现场旋转方向钻孔作业的需要。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com