自调整PID控制器可以增强传统的PID控制效果在MATLAB仿真环境下进行模糊自动PID控制器的设计和搜索,仿真结果表明模糊PID控制器可以得到改善。
通PID的控制效果。时,保证了原PID控制的稳定性和可靠性。糊控制; PID; MATLAB简介传统PID控制由于结构简单,易于实现,效果稳定,在大多数工业控制过程中得到广泛应用。
管近几十年来出现了许多先进的控制算法和智能控制策略,但典型的PID控制和各种增强型PID控制仍然是过程控制最实用的控制策略[1]。而,近年来,工业过程控制的复杂性变得越来越复杂,并且在控制效果和效率方面的相应要求也增加了。统的PID调节参数在过程控制后不会改变,缺乏灵活性和速度,各种参数可调的自适应PID可以在保持原始稳定性的同时提高其适应性。和可靠性,以改善控制系统的控制。糊PID控制器执行通过推断floue.Les实线调整和时间PID参数从参数在PID控制器PID调节过程的每个阶段的不同需求模糊推理规则中根据实时被改变PID控制器输入。化和改进传统PID控制的参数。PID控制器模糊PID控制器,KP,KI和KD的三个基本参数的结构设计,根据运行经验和模拟计算通常确定的初始值,然后根据修改它真实控制对象,然后将其整合到实际操作过程中调整,以实现相对理想的最终控制效果。此,传统PID控制中最困难的部分是确定基本参数,需要大量的调试经验才能找到相对合适的参数值。
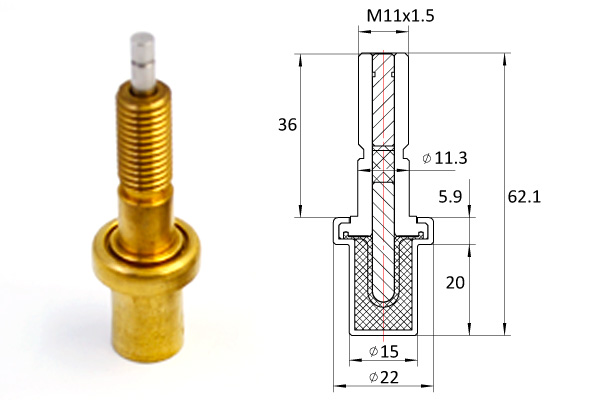
常,为了确保系统的稳定性,必须稍微降低控制灵活性和反应速率。用模糊PID作为参数自我调整PID的一种方法是将PID调整过程的专家经验转换为模糊规则,并通过推理校正和调整其参数。糊,以保证经典PID的稳定性。活性。糊控制是智能控制的一个重要分支:它将人类自然语言中包含的知识转化为模糊函数,恒温阀芯然后通过计算机系统进行识别。糊控制不掩盖控制过程,而是模糊地将人类语言和表达转换为函数,然后将函数传递给计算机系统进行处理。糊控制可以对复杂的控制对象实现良好的控制效果,特别是那些无法通过建立精确模型进行分析的控制效果,但只有在需要合理的科学合理的设计和模糊规则的情设置PID参数的过程可以提取丰富的专业知识和操作经验,但同时它是一个线性和高度耦合的控制环境,使模糊控制易于实现。且效果明显。
初始调谐阶段,偏差e的绝对值很大,可以增加KP的值以加速系统的反应速率并且可以更快地减小偏转值,同时减少KD以维持控制的动态稳定性;在中间阶段,偏差e的绝对值是中等大小。时,可以减小KP以避免过冲,并且适当地增加KI以减小稳态误差。
调整的最后阶段,偏差e的绝对值和偏差ec两者的变化率都相对较小,在这种情况下,需要采用更大的值KI和值KP和KD适度,以确保系统的稳定性[4]。糊PID控制器仿真本文在MATLAB环境中模拟和研究模糊PID控制器。MATLAB是一种流行的科学计算软件,适用于许多学科的学习和研究,以及许多自动控制工具和软件。

MATLAB不仅提供强大的数值计算,还为科学研究和工程设计提供建模和仿真环境。包括Simulink,一种相对先进和强大的系统仿真软件,能够建模,模拟和分析各种动态系统。糊逻辑工具箱(MATLAB)模糊逻辑工具箱功能强大且易于使用,可以简单有效地设计和分析模糊控制。先,模糊PID推理系统在模糊逻辑工具箱中定义,模糊逻辑工具箱使用命令行或图形用户界面模拟模糊系统。文采用简单实用的图形界面。出了图1。
糊控制器结构选择Mamdani类型并选择相应的模糊逻辑算法,命名为两个输入变量e和ec,并生成诸如KP,KI和KD之类的变量。义输入和输出变量的模糊子集,隶属函数选择最简单的三角函数来实现。前面的分析中修改模糊控制规则,通过模糊规则观察器和编辑器提供的输出表面观察器设置模糊控制器,然后发送最后修改的模糊控制器。Matlab的工作,然后在Simulink环境中执行模糊控制模块集成。

后,在Matlab工作空间中发送的模糊控制器嵌入到仿真模型的模糊逻辑控制器(模糊逻辑控制器)中,仿真持续时间设置为60秒,显示结果为示波器返回Matlab控制窗口。论与总结仿真结果表明,与传统PID控制器相比,模糊PID控制器显着降低了系统溢出,提高了控制系统的响应速度。过建模,并在Matlab环境下模拟模糊PID控制器,可以有效地观察控制的效果,更重要的是,模糊PID控制器参数,可以很容易地调整,以提高控制器的设计和便利其实现。于传统的PID控制和模糊控制,神经网络等智能控制算法,控制系统参数的自动调整是一个重要的研究重点和改进控制算法的重要途径。文在Matlab仿真环境下设计并研究了模糊PID控制器,通过模糊推理实时调整了典型PID调节参数,仿真结果表明控制器性能有较大提高。始PID控制的效果。统PID控制的稳定性和可靠性,在提高速度和灵敏度的同时,提高了控制效果。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com