针对传统遗传算法存在的问题,如进化速度慢,局部搜索能力不足以及早熟收敛的风险,本文采用基于遗传算法的自适应遗传算法(AGA)。统的PID控制器设置。化问题。
真结果表明,采用自适应遗传算法优化的PID参数更准确合理,大大提高了控制器的动态响应速度和控制精度。化自适应遗传算法控制器(PID)参数中图分类号:TP273 .2文献标识码:A文章编号:1007-9416(2013)07-0096-01简介PID控制是业内应用最广泛的策略。
业过程控制首先,PID控制器参数的优化已成为人口关注的问题,直接影响控制的质量。前,用于优化PID参数的传统遗传算法具有不可避免的缺点。
如,早熟收敛的问题,缺乏局部搜索能力和遗传算子的非方向性[1]。统遗传算法的这些缺点和缺点限制了遗传算法的推广和后续应用,因此需要进一步研究和讨论遗传算法。适应遗传算法通过建立物理条件差异函数来调整交叉和突变的概率,遗传算子具有很强的适应性。适应遗传算子可以根据种群的进化随时调整进化策略和进化方向,这极大地提高了算法局部搜索的效率,并防止了出现过早现象[2]。

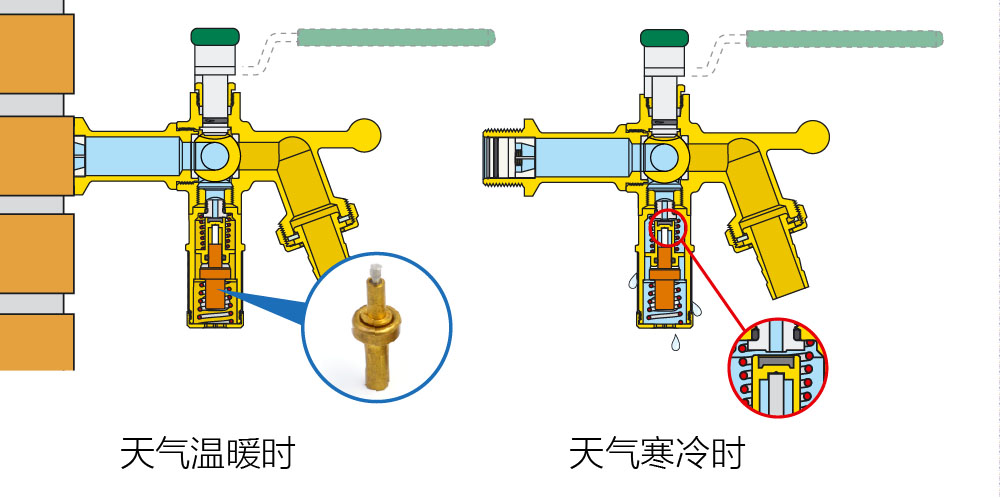
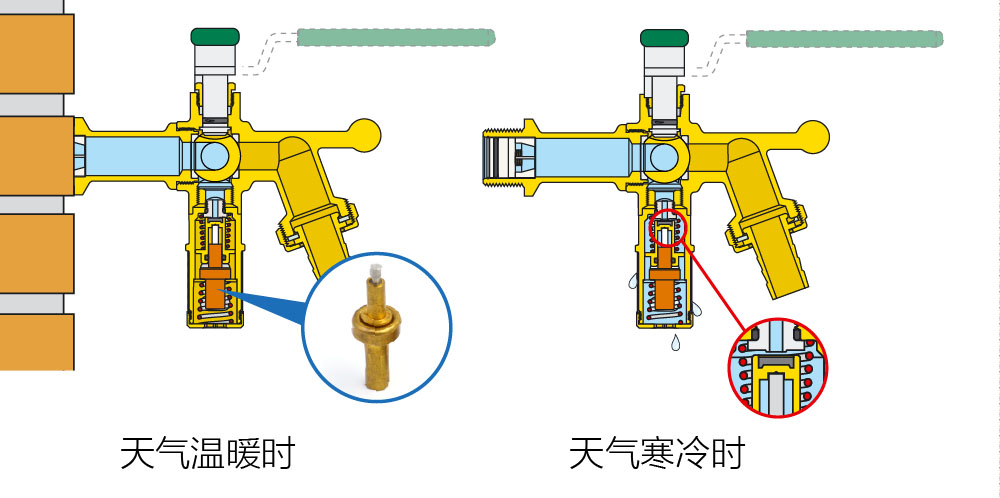
了传统遗传算法的特点外,自适应遗传算法还具有以下新特点:(1)避免过早出现问题并具有强大的全局搜索能力。(2)避免不规则问题,具有强大的本地搜索能力。(3)遗传算子的运算具有较高的方向性和收敛性。适应遗传算法优化了控制器的PID参数。拟对象由控制器选择作为模拟对象。应特性是二阶传递函数:采样时间为1 ms,输入控制是逐步传递信号。G(S)=两种算法的比较由Matlab编程,受控对象的PID参数分别用传统遗传算法和自适应遗传算法定义。定模拟参数。统遗传算法:样本数为30,交叉概率和突变概率为:PC = 0.9,Pm = 0.033。数范围[0,20],kp,ki,kd是[0,1]。适应遗传算法:样本数为30,交叉概率为PC = 0.9,变异概率为Pm = 0.20 – [1:1:大小]×0.01 /大小。于实数编码,参数kp的值为[9.0,12.0],kd的范围为[0.2,恒温阀芯0.3]。较模拟结果。
别采用传统遗传算法和自适应遗传算法,协议后PID控制器的参数如表1所示。化对象的阶跃响应如图1所示。1通过传统算法调整PID参数,控制器上升时间为0.04 s,调整时间为0.06 s。
旦优化了自适应遗传算法,控制器的上升时间为0.01秒。此,自适应遗传算法优化的PID参数更准确,更合理,大大提高了控制器的动态响应速度。
论飞机环境控制系统采用PID控制,调整系统的环境参数。此,合理和适用的PID参数的定义对于提高控制器的响应速度和控制精度具有实际意义。
真结果表明,自适应遗传算法优化的PID参数明显优于传统遗传算法,提高了响应速度和控制器控制精度。

本文转载自
恒温阀芯 https://www.wisdom-thermostats.com