由于其高的扫描和其自动化程度高,多普勒天气雷达系统CINRAD / SB提供更好的性能和自动化是多普勒天气雷达的一个雷达监视网络上的天气变化的主要产物。践证明,气象雷达CINRAD / SB青睐的网络部署,雷达的维护和安全qu’ingénierie系统:一些文章先驱者系统暴露的自动校准技术,新一代天气雷达,其中的在未来的气象雷达的操作和维护中发挥作用。要的领导作用,笔者通过日常的工作经验,总结了调试,研磨,操作测试,并出现在雷达技术问题找到相应的解决方案操作雷达,维护和设计。象雷达;半闭环控制;伺服工作原理和伺服控制操作数据交换周期的合理配置为45 ms(即伺服系统接收处理器发出的气象工作模式命令)每个周期的数据并返回到更高的数据处理器天线位置,速度和BIT数据),带数据处理器接口的RS-232串行通信,19.2 Kbps波特率,双工因为从动系统不仅用于负载的惯性,而且用于可靠性和高稳定性的要求,然而,控制的准确性不高。此,AC伺服控制器,工业计算机,AC伺服电动机和一些外围电路构成从系统。本工作原理和控制工作如图1所示。闭环控制方案具有控制伺服系统的优点:由于工业计算机接收到命令从串口发送6个字节并将其转换为Lenze伺服控制器的位置和速度值,接收并处理天线座信息。CAN总线控制伺服控制器,在这个阶段,收集由现场总线获得的发动机速度,则相应的指令是由控制器发送给异步伺服电机,用于控制的基础上的操作天线和获得的数据通过串口传输到数据处理器;关于模式切换,工业计算机可以将各种信号传输到伺服控制器的数字端口,以便相应的定位模式(天线可以使用指定的方位角和高度值)并且速度模式(天线操作模式扫描模式)可用于控制方向。升电机正在运行。
Lenze伺服控制器的伺服控制器是控制天线的主要部件。优点主要体现在以下几点:电流回路,速度回路和位置回路可以自行校正,客户可以根据需要调整PID校正或使用。适应调整功能用于校正。部结构是模块化的。制器内的每个模块提供相应的接口,用户可以通过简单的接口连接获得所需的控制模式。控制器可以支持旋转变压器,增量式编码器,编码器的速度的正弦和余弦的绝对或相对position.The和返回端口提供输入2个模拟输入2个模拟输出,数字输入5个4个数字输出。持RS232 / RS485,光纤,Interbus的-S,PROFIBUS DP,CAN和其他通信方法,包括CAN接口被集成到伺服控制器,它构成了通信的控制的分辨率的基础。
有自检和保护功能。可以识别在各种内部和外部条件如温度过高的缺陷,欠电压,过电压,过电压,短路等,并导致许多响应于所述缺陷如警告,电动机的快速停止的水平,和内部触发记录缓冲区。障类型和发生时间。要问题和解决方案伺服系统的精度设定伺服系统的可靠性和稳定性要求,但控制的精度要求不是很高。此,该系统使用半闭环控制方案,即:链和天线(负载)在闭环之外。而,采用半闭环控制策略后,由于传输链在闭环系统之外,传输链的传输误差和滞后阻止了传输系统的关闭。
统精确定位,满足指标要求。度指标无法完成:)方位角和仰角定位误差小于0.2;)无论指定范围内的速度如何,角速度误差的精度均小于5% ;)超过位置循环小于1%(取较低的值)[9]。此,在设计中,适当地控制驱动链的精度以满足从系统的定位精度指标。闭环控制方案不仅充分利用了伺服控制器的优异性能,还减少了外围电路,简化了程序结构,便于调试和控制。要的是提高系统的可靠性,稳定性和可维护性。CAN总线通信方法气象雷达伺服系统需要实时监控和响应,具有以下特点:数据交换周期短,数据交换量大,错误率高。
数据和伺服控制器自身功能的组合。要的问题在测试之后,标准RS-232和24 CCITTV通信不能满足要求或效果不是最佳的,因此,只有在CAN总线可以用作一个通信方法。CAN总线的最大数据传输速率为1兆比特/秒,这具有以下优点:高容量控制,高可靠性和容错性,良好的实时响应,执行和协议的低成本简单的沟通。服控制器具有内置在CAN总线接口,并使用CAN总线来实现通信,这不仅节省了转换N / A和A / d一般需要的控制,而且该通信方法控制,同时确保CAN总线的容错性和高成本。势。合理配置伺服控制器后,将工业计算机连接到伺服控制器的CAN总线可以完成系统的完整操作。

据指定的索引要求,伺服系统每隔45 ms与更高级别的数据处理器交换数据。而,在传统的参数读取模式(例如必须连续收集的速度和其他参数)中,可以在Lenze伺服控制器接收到参数读取操作之后获得参数。须执行数据采集和计算处理(大约30到50毫秒)。45 ms间隔之后,该值(即总线)可能忙于其他读取和写入操作。不会返回所需的参数值(例如速度)。于伺服控制器的参数由32位二进制数处理,因此集成的CAN总线过程数据通道用于将二进制数直接传送到图2中的DATA1到DATA4的位置。

据由工业计算机传输。疗。于从过程数据通道获取数据是硬件密集型的,因此大约需要1到2 ms。旦工业计算机在总线上收集数据并在2~3 ms后对其进行处理,就可以获得所需的参数值,从而使总线可以空闲,以便其他说明书可以占用公交车。用该方法,采用伺服控制器采集功能,充分利用工业计算机的高总线速度和强大的计算能力。管CAN总线用于正确解决通信控制,但还出现了另一个问题:伺服控制器是交流变速控制装置和正弦波脉冲宽度调制技术内部法通过。
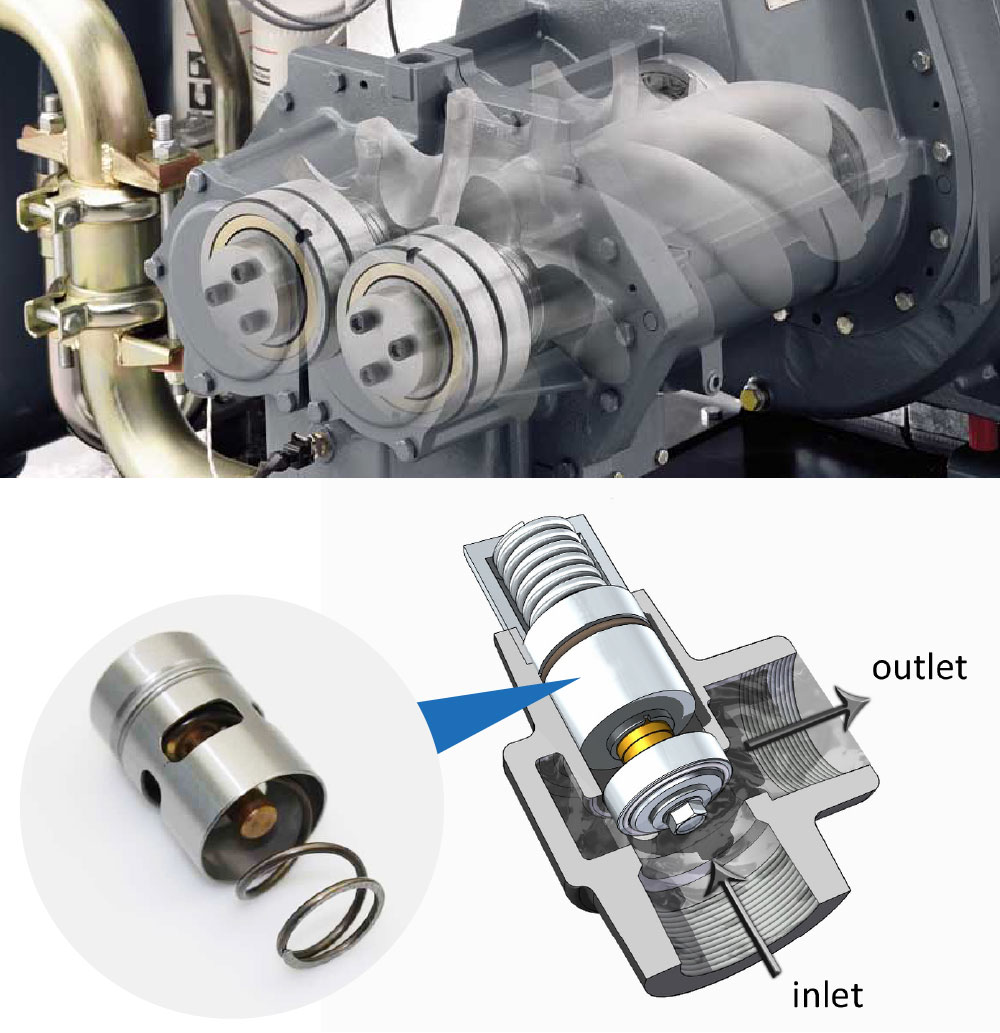
调试过程中,如果接地效果不好,CAN总线错误计数器会累积到一定值,当总线出现时CAN总线会自动出现被封锁的状态。时,伺服控制器无法通过CAN总线进行控制。然接地已经改进并且问题已经解决,但CAN总线是工业计算机伺服控制器的唯一控制通道。明显,公共汽车站是一个失控状态,必须采取有效措施以避免任何失去对系统失控的风险。服控制器提供三种类型的CAN总线复位模式:主电路再次为插入式总线(不是CAN总线)提供发送复位命令,并写入和复位复位参数。证方位角的控制根据测试要求,恒温阀芯测量伺服系统的方位角和仰角可以从data.The精度进行分析的闭环的性能和高程符合索引的要求,表明可以使用闭合半环控制方案来正确控制传输链的精度。服务运行期间,由天线的动态误差引起的自动保护停止是2次/月,并且当雷达重新激活时不需要重新激活伺服系统。
明CAN总线的通信方式稳定可靠,达到通信速度。要求还表明现场总线自动复位处理方法是成功的。测试和商业操作期间,从系统可以根据指令准确地切换各种人体扫描模式并接收各种命令,指示人体扫描模式和操作模式开关满足要求。用半闭环控制方案,通过适当控制传动链的精度来解决精度定位问题,通过CAN总线通信方法解决通信和控制问题,并实现自动复位并且通过从控制器的相同功能来解决切换CAN总线的操作模式。有助于操作和维护人员了解从系统的工作原理,便于分析和维护系统故障,并提供设计从系统控制问题的经验。
项现场试验的结果表明系统性能指标符合要求。
系统是在测试操作和操作稳定,可靠,这表明所述AC伺服控制器的基于CAN总线命令给伺服系统气象雷达的应用是成功的,并且将结果解决问题。据天气雷达数据处理器的需要,CAN总线有效地解决了控制通信的问题,但它的缺点是CAN总线本身不能自动复位。管使用其他方法来解决问题,但事实并非如此。想的解决方案
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com