本文研究了动态定位系统的控制策略,提出了动态船舶定位系统的限制lqr控制方法。先,通过求解Riccati方程得到系统的最优控制输入:考虑到最优控制输入可以超过推力系统的输出范围,在此基础上增加限制链接并且控制输入被控制到推力系统给出的最大值。推动。真分析验证了控制方法的有效性。舶动态定位;有限的引言随着能源问题的不断增加,公海资源对人类越来越重要。上动态定位系统用于海上作业,例如海上平台,潜艇潜艇和军用船只。
用也变得越来越普遍。舶的动态定位系统一般由三部分组成:位置测量系统,控制系统和推力系统。
置测量系统测量船舶的当前位置,控制器根据船舶实际位置与船舶实际位置之间的测量差异,计算在环境干扰情况下将船舶返回到所需位置所需的推力。期值,推力系统执行每个推进器的推力协调分布,使船舶保持在风浪扰动下设定的航向和位置。
中,控制技术是动态船舶定位系统的基础技术,也是动态船舶定位系统发展水平的标志。态船舶定位系统有很多控制方法,如PID控制,bang bang控制,自适应控制,鲁棒控制,恒温阀芯非线性控制,智能控制等。[1]。统的线性二次型最优控制(lqr)设计方法包括选择线性系统作为状态空间,并选择针对对象状态和对象输入的二次性能指标。制。当的控制输入使二次目标函数最小化,并获得系统的最优控制律[2]。而,通常可以在动态定位系统的推力系统中施加的推力是有限的:当控制器中所需的推力太大而不能大于最大指令力时推力会产生,控制系统将无法正常运转。此,有必要向控制器添加限制链接以允许实现控制系统。此,本文提出了一种基于lqr控制方法的动态船舶定位系统的限制lqr控制方法。于动态船舶定位系统,该模型主要考虑船舶在水平面上的三个运动自由度,即摆动,摇摆和摇摆。船舶坐标系中选择船舶速度矢量:U =(u,v,r),然后在大地坐标系中选择船舶位置矢量:=(x,y,)。u,v,r分别代表船舶的摇摆,摇摆和滚动速度x,y,它们分别代表船舶在测地坐标系中的纵向,横向和倾斜角度。
舶位移与速度之间的关系可以从坐标系定义中获得:坐标变换矩阵:船舶的低频运动是由螺旋桨,风,电流引起的和海浪ordre.La于1994年由Fossen提出第二模型结构,该容器是水平低频的运动的三个方向的数学模型:摇动,摇摆和摆动是:表示的控制输入,表示未风化环境的扰动动力,如风,波浪和流动,惯性参数矩阵,M包括质量惯性和增加的流体动力学惯性,D是矩阵阻尼,其中水动力参数通常由海试测量,xG是从船中心到重心的距离。制器设计基于现代控制理论。次线性最优控制器的设计思想如下:对于给定的状态空间形式的线性系统,让我们将目标函数作为对象状态的二次函数和输入。制作为表现。线性系统的约束下,指标选择适当的控制输入以最小化性能指标功能。于线性静止系统:X(t)是n维状态向量,U(t)是r维控制向量,Y(t)是1维输出向量。
虑二次函数J:其中Q和R分别是X和U的加权矩阵,Q是n×n型的确定半正对称常数矩阵; R是r×r型的正定实对称常数矩阵,最优控制目的是找到最优控制输入U *,使性能指标(7)的公式达到最小值。据极值的原理可得:U *(T)= – KCX(T)= – R-1BTPX(T)(8)其中,Kc为最佳反馈增益矩阵,P是所限定的矩阵积极的积极,谁对利卡感到满意。

出了方程(9)的非负对称解。PA ATP PB-1RBP Q = 0(9)但是,上述控制方法对控制输入没有限制。过上述步骤获得的最佳控制输入U *(t)可以大于系统可以给出的最佳控制输入U *(t)。工程应用中通常无法实现的最大推力要求控制输入受到约束并且将约束链接添加到系统中,以便在系统中检查系统控制输入。
个海滩。定最大系统推力值当系统输出的最佳控制输入值U *(t)大于系统最大推力值时,将指令输入值作为最大系统推力。此,U(t)系统的控制律如下:模拟船模型的参数如下:船长2800毫米,船宽762毫米,船高498毫米,船重230 kg,平方系数0.652,水管长度2691 mm,初始航向30o,船舶初始速度1.1 km,重心距离200 mm。
据上述模型的计算方法,计算船舶的数学模型,得到船舶模型的无量纲惯性参数矩阵和阻尼系数矩阵:图1系统进入无限制;图2无剪切系统的输出曲线3限制后,系统的输入曲线由Matlab工具在纵向上模拟,加权矩阵分别取R = 10,增益矩阵为可以以Kc = [3.1623 1.2672]的形式获得最佳反馈。先,不限制控制。行模拟,实验结果如图4和图5所示。2显示系统的控制效果更好,并且可以在不添加限制器控制的情况下达到平衡状态,但如图1所示,控制输入太大而且一般推力系统不能满足。加限制器控制,取= 5N,模拟后,实验结果如图3和图4所示。4添加限制器后,系统的输出曲线如图3所示。加限制器后,系统的控制输入限制为5 N.如图4所示,系统的控制效果始终良好,几乎没有限制。接的影响仍然可以提前达到稳定状态。文提出了一种动态船舶定位系统模型的lqr限制控制方法:在传统的lqr控制的基础上增加了限制器控制,解决了推力问题。传统的lqr控制中,所需的控制输入非常重要。现了该问题并进行了模拟分析。真结果表明,该控制方法在控制输入限制在一定范围内的同时提高了控制性能。
本文转载自
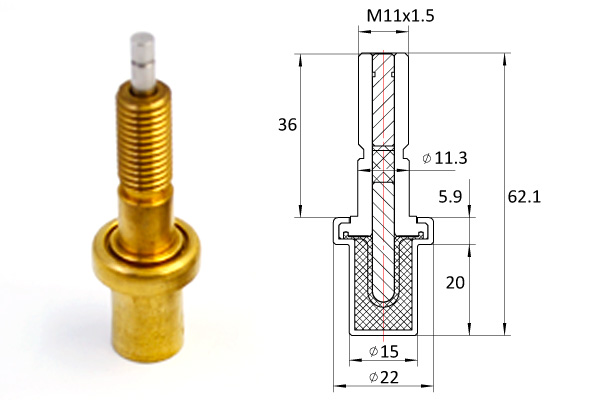
恒温阀芯 https://www.wisdom-thermostats.com