电力系统的稳定性主要取决于电动机速度和电压的响应特性,有必要同时控制两者。
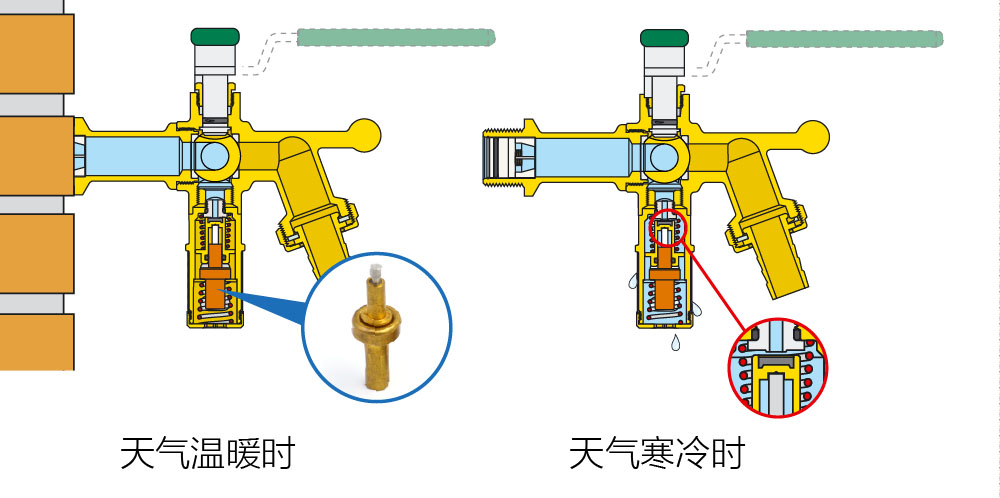
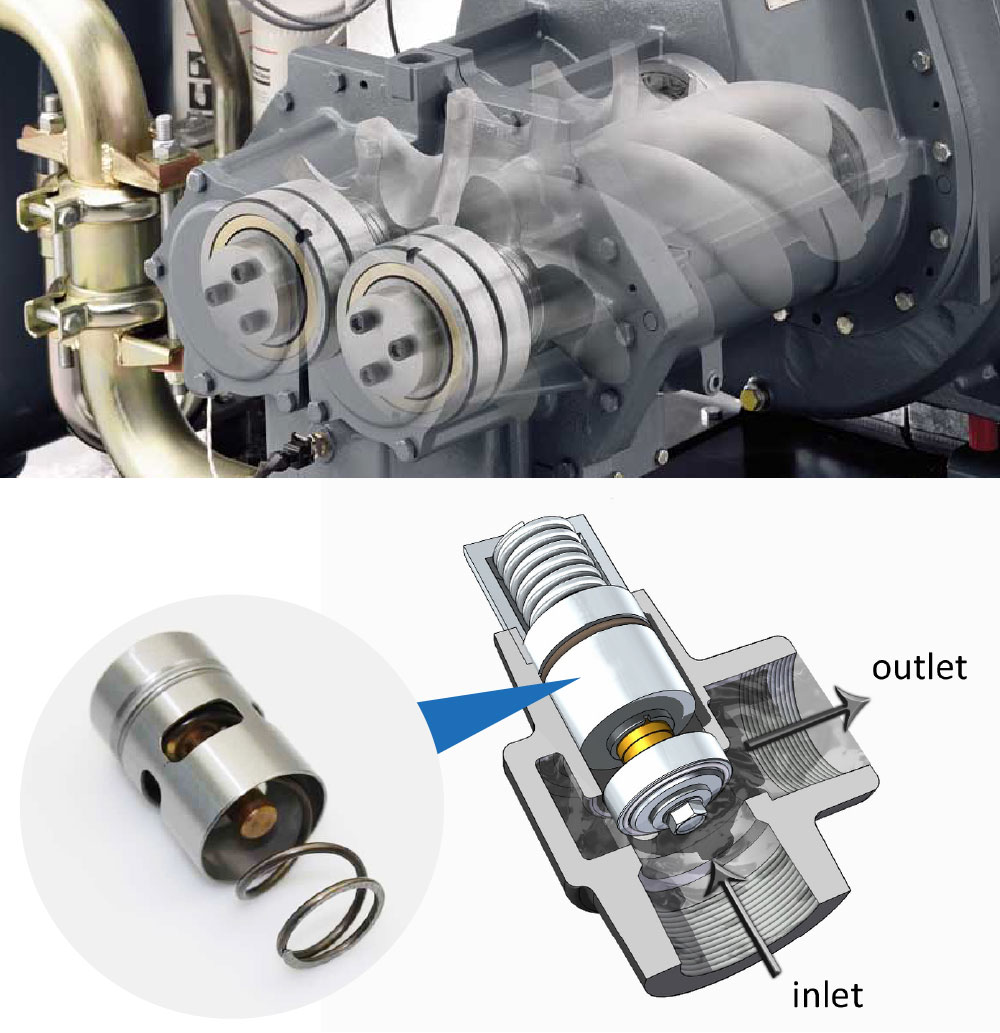
了进一步提高小型同步发电机组的完全自动化水平,集成了同步组电压和速度控制器,包括保护,励磁控制,速度控制,网络连接控制和控制提出温度。制器以MSP430F2274为主处理器,CPLD为辅助控制器,使整个集成控制器具有低功耗,灵活性,可靠性和适应性的特点。步发电机;集成控制电压转速表; MSP430F2274; CPLD简介随着单片机和数字通信技术的快速发展,恒温阀芯单元保护,励磁控制,网络连接控制的集成控制,温度和其他设备成为可能[1]。可以降低同步发电机控制装置的成本,但也提高了装置的可靠性和可控性。文提出了一种以单片机为中心控制装置的集成小型同步发电机控制器,并详细介绍了其软硬件设计,结构和功能。1硬件设计硬件组成的集成同步组电压和速度控制器原理图通过MSP430F2274主控制,CPLD进行辅助控制,完全控制发电机电压和速度[2]。中,控制器主要完成单片机的模拟量数据采集,切换量和数据处理,并通过CPLD进行系统的逻辑控制。件框图如图1所示。控制器选择TI [3]芯片MSP430F2274,它消耗的功率非常小,是一个带有一小组指令的混合处理器,可提供控制。速,实时的信号处理。控制器的主要控制功能包括计算决策和控制部分,由单个MSP430F2274执行。使用单片机的A / D转换器精确采样和测量模拟量,测量交流信号频率和相位检测,根据设备的状态协调各模块的工作。
前同步发电机组,选择相应的控制策略提供操作控制命令,以执行同步,励磁和速度控制等控制功能。CPLD逻辑控制该系统选用CPLD EPM7128芯片MAX7000系列来执行逻辑控制[4]。EPM7128芯片具有128个宏单元和8个逻辑网络模块,最多84个用户I / O引脚。

EMP7128实现的系统逻辑控制分为三个模块:外围模块芯片选择,中断管理和LCD控制。(1)外围模块芯片选择命令主要用于完成单片机控制下外设和端口的选择,包括外部扩展串口的点亮和复位。拟通道照明和I / O缓冲方向选择,数字输入锁定和输出缓冲等。[5]。(2)中断管理完成对整个系统外部中断的控制。

据系统要求,扩展CPLD以扩展外部中断。自外部扩展组件的多个中断请求被发送到CPLD以进行优先级判断,然后将响应中断发送到CPLD。MCU用于治疗。
(3)LCD是一个慢速器件,为了配合单片机的定时,系统还配置了LCD控制模块。入信号输入信号包括模拟和开关量。网电压,电流和频率,励磁电流,端电压,定子电流和模拟量的频率通过调理电路发送到MCU进行采样和数据处理。
号,并将相应的物理量转换为标准的0-3V信号。磁系统,速度控制系统和同步装置所需的基本数据。力轴承,导向轴承,发电机定子铁心,线圈等部件的温度信号由温度传感器转换为电量,然后由单片机处理。换信号包括系统操作切换量和系统的操作状态切换量,这些信号被光隔离并发送到MCU [6]。统的操作开关量主要有开/关控制,给定的有功/无功功率指令等。作状态开关的数量主要包括系统的电源状态,断路器的状态,断电开关的状态,隔离开关的状态,轴承的温度信号,事故和行动的信号。出信号的输出信号包括输出切换量,励磁电路主电路的跳闸脉冲,速度控制脉冲和断路器的闭合脉冲。MCU根据现场开关的状态进行分析和评估,并输出开关或相应的脉冲信号以控制灯,继电器和报警装置。CAN通信集成控制器的通信功能包括单片机与励磁控制器,控制器和上位机之间的通信,它是在CAN总线的基础上建立的[7]。信模块使用PCA82C250 CAN总线收发器作为主控制器和EMP7128 CAN控制器之间的接口,以执行差分总线传输和接收功能。了有效抑制总线引入的干扰,在设计中使用光隔离电路连接到PCA82C250。外,为了提高PC的运行效率,TMS44400动态内存用于扩展动态存储间隔。3显示了系统的CAN初始化过程,图4显示了中断服务程序的流程。收中断服务程序的过程与发送过程相反。2 CAN总线接口初始化流程图图3系统中断传输服务流程图图4键盘集成控制器软件主要流程图和键盘显示确定为集成控制器进行控制控制器的输入设备,同时使用LCD显示状态和操作结果单元的操作,包括主要参数,如电压,电流值和断路器。统电源的供电电压为3.3 V,外围电路所需的电源电压为5V,±12V,24V,可通过外部电源(如小型变压器)供电。足不同场合的需求。5同步网络连接控制流程图图6网络连接后励磁速度控制流程图图7启动加速流程图集成控制软件设计控制器实现功能电压和速度集成控制器主要符合单元保护,速度控制,励磁控制,同步控制和温度检测功能如下:单元保护:主要是对机组的控制进行补充序列和防止设备启动,停止,事故和紧急停止的非电气事故。
据小型同步发电机组的特点,发电机定子,过压,定子接地,复合过流,过载,转子接地和磁保护差动丢失是实现。度控制:在设备连接到网络之前,速度控制系统在以下状态下运行。接网络后,PID控制用于实现闭环速度控制。制连接到网络:如果控制电压和频率在同一时段相遇,则集成控制器获得电源输入电压和电压的频率差和频率差加速度在端子处,结合计算前进时断路器的闭合时间当制动角度等于设定值时,集成控制器发送闭合脉冲,并且该单元连接到网络。度控制[8]:铁芯和定子线圈温度信息由温度传感器转换为功率信号,并送到单片机的A / D转换模块,通道为由CPLD选择以实现任何通道的模拟信号。取和监测温度。件设计基于MATLAB强大的信号处理,通信,控制系统设计,测试和测量[9-10]功能。成控制器软件在MATLAB环境下编写(主要过程如图4所示)。5,6和7分别是在主流程图中连接到网络的同时控制,激励控制和速度以及启动加速的流程图。论该设计通过MSP430的主控制和CPLD的辅助控制,提供对发电机组的励磁,速度控制和同步连接的完全控制,并具有相应的监控和运行功能。保护。控制器和CPLD芯片的高集成度不仅简化了硬件电路,还降低了系统干扰的可能性。此,这种集成电压和速度控制器在小型同步发电机组中具有一定的应用前景,特别是对于小型水电站[11]。
本文转载自
恒温阀芯 https://www.wisdom-thermostats.com