介绍了磁致伸缩位移传感器的工作原理和测量小位移参数的方法。传感器具有以下特点:精度高,寿命长,安装方便。种位移变化的测量是自行火炮性能检测的重要组成部分,针对现有测试方法的不足,提出了一种基于运动的位移测量系统,并应用于性能测试。
行式手枪。Out:该方法易于使用,测量精确,高度自动化,适用于广泛的应用。
结:在介绍其基于所述磁致伸缩换能器的原理,本文提出的测量仪,其具有可精度高,寿命长,容易装配的特征的小位移。于炮兵主要特征的考验。于现有测试设施的失败,该方法受到炮兵特性测试。致伸缩位移传感器应用于位移测量。试以断定关键词:磁致伸缩,性能测试,位移传感器关键词:磁致伸缩,测试特征,位移传感器分类号:TP212文献:A文章编号:1006-4311(2013)30 -0305-02简介测量小型机芯在自行火炮,坦克和起重设备中非常常见。以检查。用于某种类型的突击转向系统的各种性能感测指示器中,刚度,低速枪速度和漂移速度是重要的。些类型的测试都对应于小位移的检测。前,炮兵制造商,部队和修改工厂使用秒表,编程目标和上述项目的手动记录方法。动化程度低,测试准备时间长,测量精度难以保证。家主管研究机构已开发出测量设备,如有线测量设备,能够进行自动测量以确保准确性,但测量仪器的安装非常繁琐。

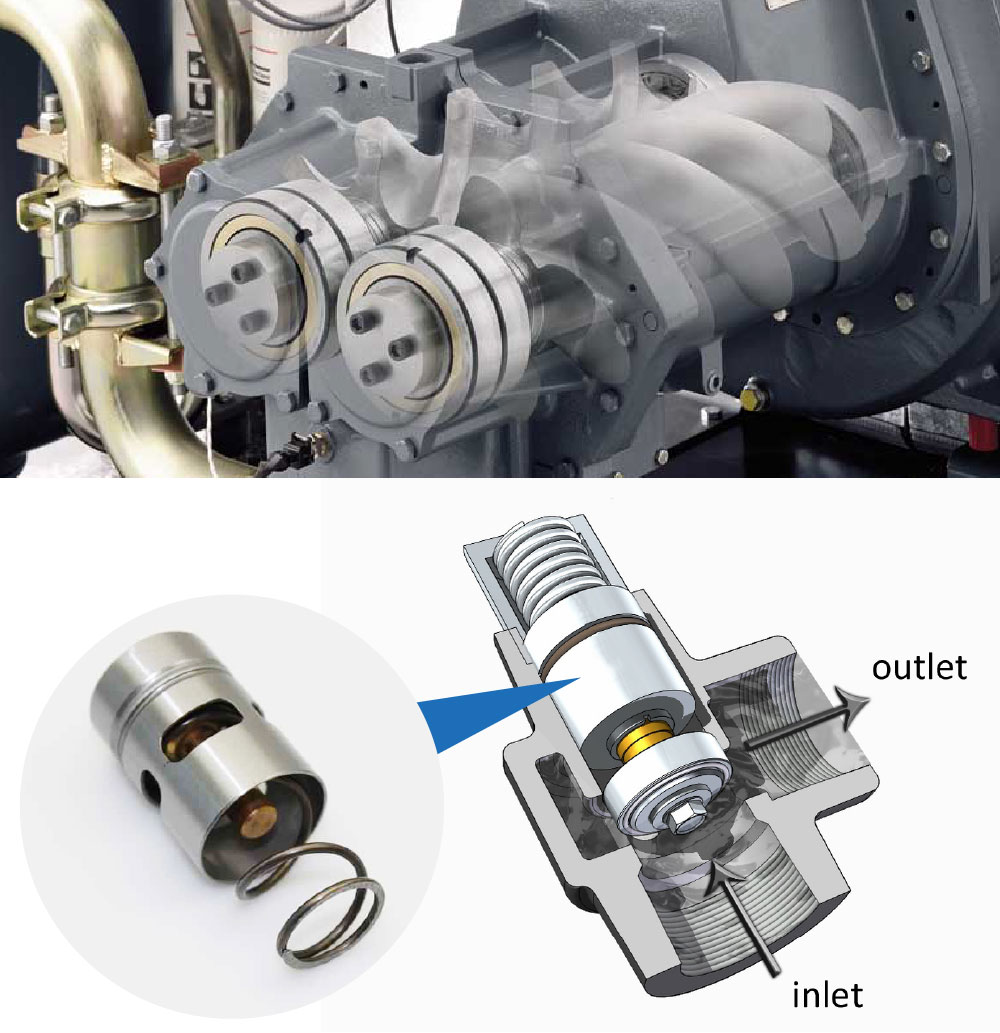
有很多配件。队急需的是便携式检查装置,易于安装,配件少,使用方便。文提出了一种利用磁感应位移传感器测量火炮位移参数的便携式传感装置。致伸缩传感器的工作原理磁致伸缩传感器基于磁致伸缩效应和反磁致伸缩效应。于磁化状态的变化,铁磁材料和亚铁磁材料在长度和体积上经历小的变化。种现象称为磁致伸缩。铁磁材料受到机械应力之后,其磁化状态也发生变化。被称为反磁致伸缩效应。化材料长度的变化称为线性磁致伸缩,由Johan于1842年发现。积的变化称为磁致伸缩。常研究的磁致伸缩是指磁性尺寸的磁致伸缩。述了膨胀系数λ。λ=其中l和l是当施加的磁场的强度分别等于H和0时的材料长度。性磁致伸缩系数λ稀土锶杆(TB),镝(Dy)和铁合金(Fe)的合金的是大1至2个数量级的该金属的,合金和铁氧体,并且具有大尺寸。致伸缩效应,TbDyFe被称为稀土的磁致伸缩材料。材料3000的A /米,饱和磁致伸缩.lambda.s系数的磁场基本上饱和= 750×10-6和磁致伸缩系数λ和所施加的磁场H(A / m)的之间的对应关系是一材料的磁致伸缩曲线。验已经表明,磁致伸缩曲线磁致伸缩材料稀土超稳定,重复性,也就是说,超磁致伸缩稀土材料相同的磁场下产生准确的变形相同的量。[1] [2]图1显示了稀土巨磁体的磁致伸缩材料中的位移传感器。主要由波导线,位置磁铁,B波探测器和A脉冲发生器组成。位移传感器位置磁铁是安装在可移动部件上,传感器主体安装在固定部件上。传感器工作时,脉冲发生器A发送磁感应波导线以激励脉冲电流i,产生围绕波导线旋转的磁场。置磁铁还产生固定磁场。
两个磁场交叉时,根据Widemanm效应,金属在波导的瞬时变形的作用下变形,导致波导钢的磁弹性膨胀和收缩,也就是说磁旋转波(变形波)。的传播速度是v =。中:G是波导的剪切模量,ρ是波导的密度。于G和ρ是恒定的(对于某个波导),传播速度也是恒定的。算出旋转波以v = 2800m / s的速度沿导丝的两侧传播。它通过位于波导线一端的波检测器B时,它被转换成电信号。置磁铁和波检测器之间的距离可以通过测量磁旋转波从位置磁铁传递到波检测器的时间t来确定。这种方式,位置磁铁和波导线相对于彼此移动,并且位置磁铁的位置和速度可以由磁位移传感器确定。L = vt中,其中:t是发射脉冲和反射脉冲之间的时间差,v是旋转波的速度,L是磁铁和波探测器之间的距离。传感器系统是绝对测量系统。以自动确定位置磁铁的位置,并且电源故障不会影响测量的准确性。[3]位移量的测量方法在实际测量中,测量位置磁铁在一段时间内的移动距离,即:ΔL= vt1-vt2 =vΔt因此只要选择时间起点(通常是程序的起始点),就可以通过定时Δt获得位置磁铁移动的距离ΔL。由位置磁铁传输到波检测器的磁旋转波与时间差的测量精度之间的时间差确定位置测量的精度。持续时间的测量使用计数脉冲的方法。了便于计算,速度以下列形式写入:v = 2800m / s =由此获得的位移距离单位是mm。2是用于测量时间差的电路。冲电流发生器在波导线上发射激励电流。置磁铁的固定磁场和激励电流磁场被组合以在波导线上形成应力信号。信号在波检测器中感应出电信号并放大和整形信号。在比较器参考电平比较,在超过基准电平的时候,触发信号被发送到FPGA处理器用于计数和所述处理器乘以计数值(时间)和传输速率V的值获得瞬时位移值,热敏元件然后获得该值。RS485串口输出。[3] [4]磁位移传感器性能该传感器可以执行绝对非接触式测量,具有高精度和多种特性,并且可以承受高振动环境。感器的输出信号是绝对值。

此,即使重新连接电源,这也不会对数据的接收造成问题,并且不必重新调整零位置。于传感器组件是非接触式的,即使重复测量过程,传感器也不会磨损。感器的线性度为0.387%,重复性误差为±0.287%,分辨率为0.05 mm。量范围介于50 mm和20,000 mm之间。位置和输出信号测量模式为SSI模拟,RS485,RS422,PWM等,温度范围为-40°C至 在自行火炮性能测试应用示例中,某种类型的突击控制系统的许多性能测试标志是位移量。
性,低速枪速度和漂移速度非常小,可以转换为运动检测。移传感器用于测量少量的位移参数。移传感器包括磁位移传感器,传感器支架,枪箍和定位磁铁(见图3)。位移传感器安装在磁传感器的底座上,并将底座安装在车身的上层板上。圈固定在环体的喉部中,位于体管的中间。位磁铁安装在套圈上并缠绕在磁致伸缩传感器的波导线材上。出信号电缆连接到工业计算机。测量最小瞄准速度,漂移速度和水平水平过冲时安装套圈臂和磁致伸缩传感器的方法在图4中示出。3.测量最小瞄准速度,漂移速度和垂直垂直过冲时,请参见图4了解套圈臂和磁致伸缩传感器的安装方法。体角速度与位移之间的关系计算如下:ω= 3,000 mil / s,其中x是测量开始后位置磁铁移动的距离,R半径旋转的回转和与转台相对于固定套筒的旋转中心有关的水平方向的回转半径。的距离,垂直方向的回转半径是筒形耳轴的中心与固定套圈之间的距离。Δt是测量开始和结束之间的时间间隔。以通过在测量期间计算系统软件来计算枪体在水平和垂直方向上的角速度。如:根据炮兵技术控制规范:水平漂移率≯25米/分钟,最大垂直瞄准速度4.5至6°/秒(75至100米/秒)。测量枪体的水平漂移速度时,计算机在采样后停止位移传感器信号,跟踪漂移速度曲线(见图5)并计算此间隔期间的平均实际漂移时间速度为7.255密耳/分钟,符合技术控制规范的要求。测量枪体垂直方向的最大瞄准速度时,射击者在测试开始后将操纵杆垂直拉到最大速度。
算机停止运动传感器信号并停止暂时,然后绘制最大瞄准速度曲线(见图6)。据技术控制规范计算出该时间间隔内的最大瞄准速度为5.56°/ s。论磁致伸缩传感器是基于磁致伸缩效应的新型位移传感器。传感器具有绝对的非接触式测量,高精度,宽范围和良好的环境适应性。位移传感器应用于自行火炮性能的检测,可以准确有效地测量刚度,低速枪速度和漂移速度等传感元件。过大量的安装试验,该方法适用于检测与小排量有关的性能指标,涉及自行火炮和坦克施工设备,具有广泛的应用。
本文转载自
热敏元件www.wisdom-thermostats.com